

- 제품보기·
- 모터사양·
- 특장점·
- 형명 표시 방법·
- 시스템 사용 매뉴얼

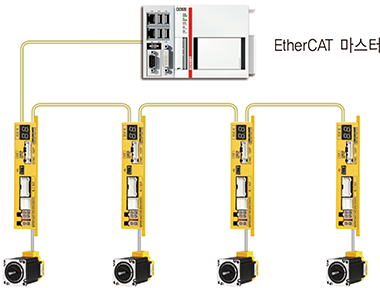
- 1. EtherCAT 대응 모션 제어
- Ezi-SERVOⅡ EtherCAT TO는 고속 이더넷(100Mbps, 전 이중 통신방식) 기반의 필드버스인 EtherCAT을 지원하는 스테핑모터 제어시스템입니다. Ezi-SERVOⅡ EtherCAT TO는 CoE(CAN application protocol over EtherCAT) 프로토콜을 지원하는 EtherCAT 슬레이브 모듈입니다. CiA402 드라이브 프로파일에 대응하며, 사이클릭 동기 위치 모드(Cyclic Synchronous Position Mode), 프로파일 위치 모드(Profile Position Mode), 원점복귀 모드(Homing Mode)를 지원합니다.
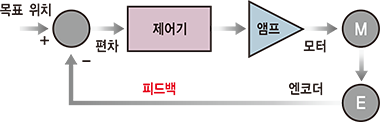
- 2. 클로즈드 루프(Closed Loop) 제어시스템
- Ezi-SERVOⅡ는 모터에 장착된 고정밀 엔코더로 현재 위치를 상시 파악하기 때문에 탈조가 발생하지 않는 서보시 스템입니다. Ezi-SERVOⅡ는 50μs마다 엔코터로부터 모터의 위치 정보를 받아 필요한 경우에 위치를 보정합니다.
- 3. No 게인 조정
- 일반적인 서보시스템에서는 성능을 향상하기 위해 반드시 게인을 조정해야 합니다. 따라서 게인 조정에 많은 시간이 걸리고, 부하의 종류에 따라 문제가 발생합니다. 그러나 Ezi-SERVOⅡ는 스테핑모터의 특성을 이용하기 때문에 게인을 조정할 필요가 없는 서보시스템입니다. 특히 종래의 서보시스템에서 문제가 되는 강성이 낮은 부하 (예: 벨트 풀리 시스템)에 최적의 솔루션을 제공합니다.
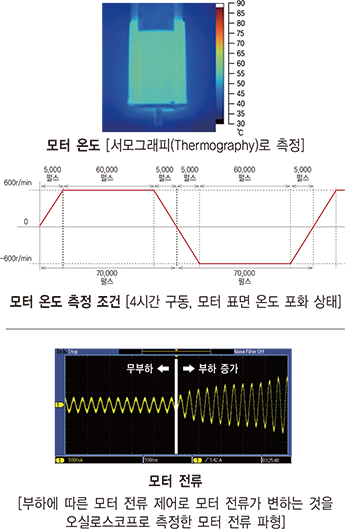
- 4. 발열 최소화 / 에너지 절감(부하에 따른 전류 제어)
- Ezi-SERVOⅡ는 부하에 따라 모터 전류를 자동으로 제어 합니다. 그에 따라 모터와 드라이브의 발열이 억제되어 에너지를 절감할 수 있습니다.
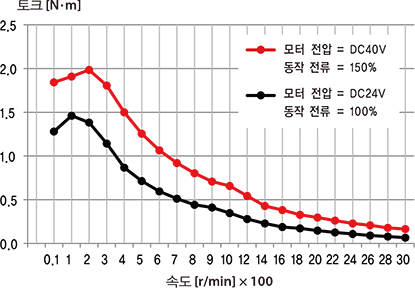
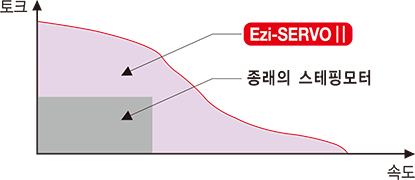
- 5. 토크 향상(모터 전압 상승 및 모터 전류 설정)
- Ezi-SERVOⅡ는 드라이브 내부에 모터로 공급되는 전압을 승압시키는 회로가 있어 모터 전압이 드라이브에 입력되는 전압보다 높습니다. 이와 같이 모터 전압이 높아서 고속에서 토크가 증가되고, 동작 전류(Run Current)를 150%까지 설정할 수 있으며, 저속에서도 토크가 증가됩니다. 또 Ezi-SERVOⅡ는 모든 속도구간에서 토크를 30% 정도 향상할 수 있습니다.
-
※ 저속 및 고속에서의 토크는 약 30% 향상
측정 조건 : 드라이브 = Ezi-SERVOⅡ-EC-TO-56L
모터 전압 = DC40V
입력 전압 = DC24V
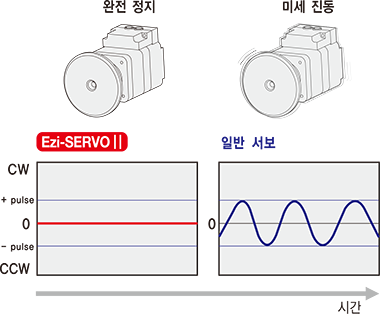
- 6. No 헌팅
- Ezi-SERVOⅡ는 스테핑모터의 특성을 이용하기 때문에 일반적인 서보시스템에서 발생하는 헌팅 문제가 없습니다. 따라서 모터가 완전히 정지하기 때문에 미세 진동이 발생하지 않습니다. 비전 등을 이용한 고속 검사 장비 등에서 Ezi-SERVOⅡ는 정지 후 진동이 발생하지 않기 때문에 위력을 발휘합니다.
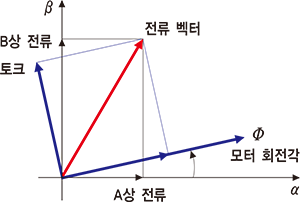
- 7. 부드럽고 정확한 회전
- Ezi-SERVOII는 기존의 마이크로 스텝 구동과 달리 고정밀 엔코더와 MCU를 탑재하여 벡터 제어와 필터링 제어를 수행하기 때문에 저속에서도 토크 리플을 발생하지 않고 부드럽게 운전할 수 있습니다.
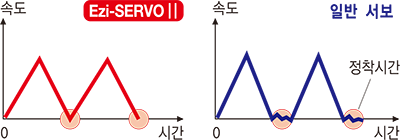
- 8. 빠른 응답속도
- Ezi-SERVOⅡ는 지령 위치에 대해 추종성이 매우 높은 스테핑모터의 장점을 활용하기 때문에 위치결정시간이 대단히 짧습니다. 따라서 단피치 운동이 빈번한 경우에 위치결정시간을 대폭 단축할 수 있습니다. 종래의 서보시스템에서는 위치 지령에 따른 동작을 완료(안정된 상태로 지령 위치에 도달함)하기 위해서는 정착시간(Settling Time)이 필요하기 때문에 위치결정시간이 늘어납니다. Ezi-SERVOⅡ는 스테핑모터의 장점을 이용하여 응답지연 시간이 짧은 고속 위치결정이 가능합니다.
- 9. 높은 분해능
- Ezi-SERVOⅡ는 용도에 맞춰 위치지령을 세분화하여 분해능을 설정할 수 있습니다. (최대 20,000 펄스/회전)
- 10. 높은 토크 / 연속 운전
- Ezi-SERVOⅡ는 저속영역에서 일반적인 서보모터에 비해 높은 토크로 연속 운전이 가능합니다. 또한 Ezi-SERVOⅡ는 탈조하지 않고 100% 부하에서도 연속하여 운전할 수 있기 때문에 기존의 스테핑모터와 달리 토크 마진을 고려할 필요가 없습니다. 회전 속도에 따라 최적의 전류제어를 수행하기 때문에 고속영역에서 고토크 운전이 가능합니다.
- 11. 고속 운전
- Ezi-SERVOⅡ는 엔코더로 현재 위치를 감시하여 100% 부하에 대해서도 최대 토크를 활용할 수 있으므로 고속영역에서도 탈조하지 않고 운전이 가능합니다.
- 12. 토크 오프(Torque Off) 기능 탑재
- Ezi-SERVOⅡ EtherCAT TO는 EtherCAT 통신과는 관계없이 하드웨어 신호로 모터에 공급되는 전력을 차단하는 기능을 제공합니다. 토크 오프 신호 접속 커넥터를 통해 TQOFF 신호가 감지되면 드라이브는 즉시 서보 오프 상태가 되고, 모터는 동작을 정지합니다.

- [ 주의사항 ] 토크 오프 기능은 모터를 정지하거나 감속하기 위해 사용하는 기능은 아니오니 용도에 맞게 사용해 주십시오.
Open-Loop 제어 스텝핑 모터 시스템과 다른점
1. 탈조에 의한 위치 오차가 발생하지 않아 신뢰성이 높은 위치결정제어가 가능합니다.
2. 정지 시에는 안정된 유지력을 갖고 있고, 기계 진동 등의 외력에 의해 위치 오차가 생겨도 자동적으로 목표 위치복로귀 합니다.
3. 오픈 루프 스테핑 시스템은 탈조를 방지하기 위해 정격 토크의 50% 이하로 사용해야 하지만, Ezi-SEORⅡV는 100%까지 사용 할 수 있습니다.
4. 오픈 루프 스테핑 시스템은 부하의 변동에 관계없이 모든 동작 속도에서 정전류 구동을 하지만 Ezi-SEORⅡV는 부하에 따라 전류를 제어하기 때문에 고속 운전이 가능합니다. (최고 속도 : 3,000r/mi n)
2. 정지 시에는 안정된 유지력을 갖고 있고, 기계 진동 등의 외력에 의해 위치 오차가 생겨도 자동적으로 목표 위치복로귀 합니다.
3. 오픈 루프 스테핑 시스템은 탈조를 방지하기 위해 정격 토크의 50% 이하로 사용해야 하지만, Ezi-SEORⅡV는 100%까지 사용 할 수 있습니다.
4. 오픈 루프 스테핑 시스템은 부하의 변동에 관계없이 모든 동작 속도에서 정전류 구동을 하지만 Ezi-SEORⅡV는 부하에 따라 전류를 제어하기 때문에 고속 운전이 가능합니다. (최고 속도 : 3,000r/mi n)
서보 모터 제어 시스템과 다른점
1. 게인 조정이 필요하지 않습니다. (부하에 따라 게인을 자동 조정)
2. 정지 후 미세 진동 없이 안정된 목표 위치를 유지합니다.
3. 독자적인 제어 알고리즘에 의해 빠른 위치결정이 가능합니다. (고속·단피치 운동에 적합)
4. 고속·단피치 운동인 경우, 정착시간이 짧기 때문에 비전을 이용한 검사 장비 등에 우수한 성능을 발휘합니다.
2. 정지 후 미세 진동 없이 안정된 목표 위치를 유지합니다.
3. 독자적인 제어 알고리즘에 의해 빠른 위치결정이 가능합니다. (고속·단피치 운동에 적합)
4. 고속·단피치 운동인 경우, 정착시간이 짧기 때문에 비전을 이용한 검사 장비 등에 우수한 성능을 발휘합니다.