



































































Ezi-SERVO
Key Point
· Ethernet 통신을 통해 하나의 GUI 프로그램으로 스텝 모터 + AC 서보 모터 + I/O + 고속 카운터 모듈 제어
- Ethernet 기반 Closed Loop Stepping System
- AC 서보 드라이브용 Ethernet 기반 1축 모션 컨트롤러
- Ethernet 기반 디지털 I/O 모듈
- Ethernet 기반 아날로그 I/O 모듈
- Ethernet 기반 고속 카운터 모듈
- 하나의 GUI 프로그램으로 Ethernet 기반 제품군 모두 동시 제어 가능


Ezi-SERVO
Key Point
· 토크 오프 (Torque OFF) 기능 탑재
· EtherCAT으로 일체형 모터 + 컴팩트한
4축 드라이브 + 중공축 모터 + I/O 동시 제어
고객분들께 판매 및 대여 가능한 데모입니다.
자세한 내용은 파스텍 영업팀으로
연락 주시면 안내해드리겠습니다.
- 토크 오프 (Torque OFF) 기능 탑재
- CiA402 드라이브 프로파일 지원
- EtherCAT 대응 클로즈드 루프 스테핑 시스템
- 주요 EtherCAT 마스터 업체들과 호환성 테스트 완료
- (Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)
- 최소 통신 주기 : 0.25[ms]
- No 게인 조정 / No 헌팅 / 고분해능 엔코더(10,000, 20,000 [ppr])

Ezi-SERVO
Key Point
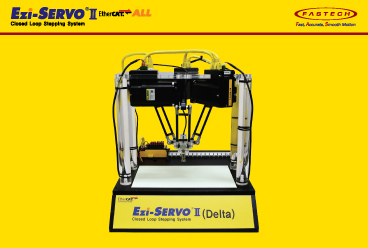
· EtherCAT으로 델타 로봇 제어
· 모터 + 엔코더 + 드라이브 + EtherCAT
일체형
- Ezi-SERVOII EtherCAT ALL과 FASTECH 마스터를 사용한 Mini 델타 로봇 제어
- FASTECH EtherCAT 마스터로 다양한 Robot Kinematics 지원(Delta, Scara, Cartesian, 6-Axis Robot 등)
- 모터 + 엔코더 + 드라이브 + 네트워크(EtherCAT) 일체형으로 공간 절약 및 배선 절감
- 감속기 장착 없이 높은 홀딩 토크 특성을 이용, 정지 시 헌팅 없이 구동 가능
- Minimum Cycle time : 0.25[ms]
- 주요 EtherCAT 마스터 업체들과 호환성 테스트 완료
(Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)
Ezi-SERVO
Key Point
· EtherCAT으로 igus 델타 로봇 제어
- Ezi-SERVOII EtherCAT 과 FASTECH 마스터를 사용한 igus 델타 로봇 제어
- 모터 + 엔코더 + 드라이브 + 네트워크(EtherCAT) 일체형 및 초소형 미니 드라이브 사용으로 공간 절약 및 배선 절감
- 중공축 모터 + 엔코더 적용(분해능 16,000 [ppr]), 중공을 통한 편리한 배선
- EtherCAT 기반 16&32채널 Digital I/O Module(e-CON / Terminal Block 커넥터 타입 채용)
- Minimum Cycle time : 0.25[ms]
- 주요 EtherCAT 마스터 업체들과 호환성 테스트 완료
(Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)

Ezi-SERVO
Key Point
· 중공축 모터+엔코더를 사용한
병렬 스카라 로봇 제어
· 중공축을 통한 간단 배선
- Ethernet 기반 제어기 내장형 Closed Loop Stepping System
- 중공축 모터 + 엔코더 적용(분해능, 10,000 [ppr])
- 20 [mm] 초소형 Captive 타입 Linear Actuator 적용
- No Gain Tuning / No Hunting
- PC 사용자를 위한 Windows Motion Library(DLL) 및 GUI 제공
- 2 Port Switching HUB 내장으로 Daisy-Chain 연결 가능(최대 254축)

Ezi-SERVO
Key Point
· Ethernet으로 8축 Ball 제어
· 일체형 모터 + 초소형 미니드라이브 + I/O
동시 제어
- Ezi-SERVOII Plus-E 를 사용한 8축 Ball 제어
- 모터 + 엔코더 + 드라이브 + 컨트롤러 + 네트워크(Ethernet) 일체형으로 공간 절약 및 배선 절감
- 초소형 미니 드라이브 사용으로 공간 절약 및 배선 절감
- Ethernet 기반 16&32채널 Digital I/O Module(산업용 표준 e-CON / Terminal Block 커넥터 타입 채용)
- PC 사용자를 위한 Window 기반 DLL 및 GUI 제공
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 20,000 [ppr])

Ezi-SERVO
Key Point
· EtherCAT으로 8축 Ball 제어
· 일체형 모터 + 컴팩트한 4축 드라이브 +
초소형 미니드라이브 + I/O 동시 제어
- Ezi-SERVOII EtherCAT 과 FASTECH 마스터를 사용한 8축 Ball 제어
- 모터 + 엔코더 + 드라이브 + 네트워크(EtherCAT) 일체형으로 공간 절약 및 배선 절감
- 컴팩트한 4축 및 초소형 미니 드라이브 사용으로 공간 절약 및 배선 절감
- EtherCAT 기반 16&32채널 Digital I/O Module(산업용 표준 e-CON / Terminal Block 커넥터 타입 채용)
- Minimum Cycle time : 0.25[ms]
- 주요 EtherCAT 마스터 업체들과 호환성 테스트 완료
(Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)
Ezi-SERVO
Key Point
· 일체형 모터와 초소형 미니 드라이브를
사용한 7축 다관절 로봇(공간 절약 및 배선
절감)
- 7축 다관절로봇에도 스텝 모터가 적용될 수 있음을 보여주는 예
- 모터 + 엔코더 + 드라이브 + 컨트롤러 + 네트워크(Ethernet) 일체형으로 공간 절약 및 배선 절감
- 초소형 미니 드라이브 사용으로 로봇에 직접 설치 가능(공간 절약 및 배선 절감)
- Hollow Rotary Index Table 적용으로 중공을 활용한 배선 가능
- Nidec Shimpo 의 Harmonic 감속기 적용
- PC 사용자를 위한 Window 기반 DLL 및 GUI 제공
Ezi-SERVO
Key Point
· 일체형 모터와 초소형 미니 드라이브를
사용한 7축 다관절 로봇(공간 절약 및
배선 절감)
- 7축 다관절로봇에도 스텝 모터가 적용될 수 있음을 보여주는 예
- 모터 + 엔코더 + 드라이브 + 네트워크(EtherCAT) 일체형으로 공간 절약 및 배선 절감
- 초소형 미니 드라이브 사용으로 로봇에 직접 설치 가능(공간 절약 및 배선 절감)
- Hollow Rotary Index Table 적용으로 중공을 활용한 배선 가능
- Nidec Shimpo 의 Harmonic 감속기 적용
- 주요 EtherCAT 마스터 업체들과 호환성 테스트 완료
(Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)

Ezi-SERVO
Key Point
· Ethernet으로 igus 델타 로봇 제어
· 모터 + 엔코더 + 드라이브 + 컨트롤러 +
Ethernet 일체형
- Ezi-SERVOII Plus-E ALL을 사용한 igus 델타 로봇 제어
- 모터 + 엔코더 + 드라이브 + 컨트롤러 + 네트워크(Ethernet) 일체형으로 공간 절약 및 배선 절감
- 감속기 장착 없이 높은 홀딩 토크 특성을 이용, 정지 시 헌팅 없이 구동 가능
- PC 사용자를 위한 Window 기반 DLL 및 GUI 제공
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 20,000 [ppr])

Ezi-SERVO
Key Point
· EtherCAT으로 igus 델타 로봇 제어
· 모터 + 엔코더 + 드라이브 + EtherCAT
일체형
- Ezi-SERVOII EtherCAT ALL과 FASTECH 마스터를 사용한 igus 델타 로봇 제어
- FASTECH EtherCAT 마스터로 다양한 Robot Kinematics 지원(Delta, Scara, Cartesian, 6-Axis Robot 등)
- 모터 + 엔코더 + 드라이브 + 네트워크(EtherCAT) 일체형으로 공간 절약 및 배선 절감
- 감속기 장착 없이 높은 홀딩 토크 특성을 이용, 정지 시 헌팅 없이 구동 가능
- Minimum Cycle time : 0.25[ms]
- 주요 EtherCAT 마스터 업체들과 호환성 테스트 완료
(Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)
Ezi-SERVO
Key Point
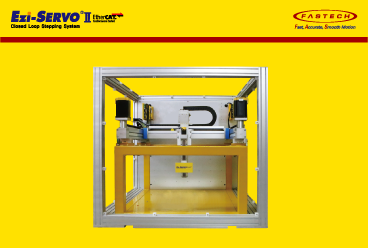
· AC 서보 + 스텝 모터 + I/O를 하나의
네트워크(Ethernet)로 제어
고객분들께 판매 및 대여 가능한 데모입니다.
자세한 내용은 파스텍 영업팀으로 연락 주시면 안내해드리겠습니다.
- Ethernet 기반 제어기 내장형 Closed Loop Stepping System (Ezi-SERVOII Plus-E)
- Ethernet 기반 1축 모션 제어기(Ezi-MOTIONLINK Plus-E)를 사용하여 각종 서보 드라이버에 직접 접속(3M 50pin)
- Ethernet 기반 Digital I/O Module(산업용 표준 e-CON / Terminal Block 커넥터 타입 채용)
- PC 사용자를 위한 Windows Motion Library(DLL) 및 GUI 제공
- 2 Port Switching HUB 내장으로 Daisy-Chain 연결 가능(최대 254축)
- 간단 제어, 배선절감, 모션 보드의 불필요(원가절감)
Ezi-SERVO
Key Point
· 중공축 모터+엔코더를 사용한
병렬 스카라 로봇 제어
· 중공축을 통한 간단 배선
- Ethernet 기반 제어기 내장형 Closed Loop Stepping System
- 중공축 모터 + 엔코더 적용(분해능, 10,000 [ppr])
- 20 [mm] 초소형 Captive 타입 Linear Actuator 적용
- No Gain Tuning / No Hunting
- PC 사용자를 위한 Windows Motion Library(DLL) 및 GUI 제공
- 2 Port Switching HUB 내장으로 Daisy-Chain 연결 가능(최대 254축)
Ezi-SERVO
Key Point
· AC 서보 + 스텝 모터 + I/O를 하나의
네트워크(Ethernet)로 제어
고객분들께 판매 및 대여 가능한 데모입니다.
자세한 내용은 파스텍 영업팀으로 연락 주시면 안내해드리겠습니다.
- Ethernet 기반 제어기 내장형 Closed Loop Stepping System (Ezi-SERVOII Plus-E)
- Ethernet 기반 1축 모션 제어기(Ezi-MOTIONLINK Plus-E)를 사용하여 각종 서보 드라이버에 직접 접속(3M 50pin)
- Ethernet 기반 Digital I/O Module(산업용 표준 e-CON / Terminal Block 커넥터 타입 채용)
- PC 사용자를 위한 Windows Motion Library(DLL) 및 GUI 제공
- 2 Port Switching HUB 내장으로 Daisy-Chain 연결 가능(최대 254축)
- 간단 제어, 배선절감, 모션 보드의 불필요(원가절감)
Ezi-SERVO
Key Point
· EtherCAT 기반 Closed Loop & Open Loop
Stepping System
고객분들께 판매 및 대여 가능한 데모입니다.
자세한 내용은 파스텍 영업팀으로 연락 주시면 안내해드리겠습니다.
- CiA 402 Drive Profile 지원
- EtherCAT 기반 Closed Loop & Open Stepping System (Ezi-SERVOII EtherCAT/Ezi-STEPII EtherCAT)
- No Gain Tuning / No Hunting / 고분해능 엔코더(10,000, 20,000 [ppr])
- CSP, PP, HM Mode 지원
- Minimum Cycle time : 0.25[ms]
- 주요 EtherCAT 마스터 업체들과 호환성 테스트 완료
(Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)

Ezi-SERVO
Key Point
· CC-Link 기반 Closed Loop & Open Loop
Stepping System
고객분들께 판매 및 대여 가능한 데모입니다.
자세한 내용은 파스텍 영업팀으로 연락 주시면 안내해드리겠습니다.
- CC-Link 기반 Closed Loop Stepping System
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 20,000 [ppr])
- MITSUBISHI PLC와 100% 호환
- Remote Device 국으로 접속(1, 2국 점유)

Ezi-SERVO
Key Point
· 고속 단핏치 모션
· 28 [mm] 초소형 사이즈의 일체형 모터
- 모터 + 엔코더 + 드라이브 + 컨트롤러 + 네트워크(RS-485) 일체형
- PC 사용자를 위한 Window 기반 DLL 및 GUI 제공
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(16,000 [ppr])
- 최대 16축 연결
Ezi-SERVO
Key Point
· KOHZU 3축 스테이지 제어
· 28 [mm] 초소형 일체형 모터 적용
- 모터 + 엔코더 + 드라이브 + 컨트롤러 + 네트워크(RS-485) 일체형
- KOHZU 정밀 XYθ스테이지 + 28 [mm] 초소형 모터 적용
- PC 사용자를 위한 Window 기반 DLL 및 GUI 제공
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(16,000 [ppr])
- 다축 제어를 지원하는 인터페이스 보드 라인업
Ezi-SERVO
Key Point
· RS-485 기반 일체형 모터를 통한
FESTO H-bot 제어
- 모터 + 엔코더 + 드라이브 + 컨트롤러 + 네트워크(RS-485) 일체형
- 저강성의 Belt & Pulley 시스템에서 감속기 장착 없이 높은 홀딩 토크 특성을 이용, 정지 시 헌팅 없이 구동 가능
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 16,000, 20,000 [ppr])
- 28, 42, 56, 60 [mm] 모터 사이즈 라인업
- 다축 제어를 지원하는 인터페이스 보드 라인업
Ezi-SERVO
Key Point
· 모터 + 엔코더 + 드라이브 + 컨트롤러 +
Ethernet 일체형으로 공간 절약 및 배선
절감
- 모터 + 엔코더 + 드라이브 + 컨트롤러 + 네트워크(Ethernet) 일체형
- PC 사용자를 위한 Window 기반 DLL 및 GUI 제공
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 20,000 [ppr])
- 2 Port Switching HUB 내장으로 Daisy-Chain 연결 가능(최대 254축)
- 42, 56, 60 [mm] 모터 사이즈 라인업
Ezi-SERVO
Key Point
· EtherCAT으로 일체형 모터 + 컴팩트한
4축 드라이브 + 중공축 모터 + I/O
동시 제어
고객분들께 판매 및 대여 가능한 데모입니다.
자세한 내용은 파스텍 영업팀으로 연락 주시면 안내해드리겠습니다.
- CiA 402 Drive Profile 지원
- EtherCAT 기반 Closed Loop Stepping System
- No Gain Tuning / No Hunting / 고분해능 엔코더(10,000, 20,000 [ppr])
- CSP, PP, HM Mode 지원
- Minimum Cycle time : 0.25[ms]
- 주요 EtherCAT 마스터 업체들과 호환성 테스트 완료
(Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)
Ezi-SERVO
Key Point
· EtherCAT으로 일체형 모터 + 컴팩트한
4축 드라이브 + 중공축 모터 + I/O
동시 제어
고객분들께 판매 및 대여 가능한 데모입니다.
자세한 내용은 파스텍 영업팀으로 연락 주시면 안내해드리겠습니다.
- CiA 402 Drive Profile 지원
- EtherCAT 기반 Closed Loop Stepping System
- No Gain Tuning / No Hunting / 고분해능 엔코더(10,000, 20,000 [ppr])
- CSP, PP, HM Mode 지원
- Minimum Cycle time : 0.25[ms]
- 주요 이더캣 마스터 업체들과 호환성 테스트 완료
(Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)
Ezi-SERVO
Key Point
· Ethernet으로 igus 4축 로봇 제어
· 힘 제어Force Control) 기능 지원
- Ethernet 기반 제어기 내장형 Closed Loop Stepping System
- igus Drylin 의 벨트 및 리드스크류 타입 Actuator 적용
- 엔코더 적용 중공축 모터를 통한 공압 배선
- 힘 제어 기능(위치 제어에서 힘 제어로의 전환 후, 소정의 힘에 도달하면 그 토크를 유지)
- PC 사용자를 위한 Windows Motion Library(DLL) 및 GUI 제공
- 2 Port Switching HUB 내장으로 Daisy-Chain 연결 가능(최대 254축)
Ezi-SERVO
Key Point
· EtherCAT으로 igus robolink + Gripper
제어
· 힘 제어Force Control) 기능 지원
- Ezi-SERVOII EtherCAT과 OMRON 마스터를 사용한 igus 5축 다관절 로봇 + 그리퍼 제어
- igus Robolink + GMT Gripper 에 컴팩트한 4축 드라이브 적용하여 공간 절약 및 배선 절감
- 힘 제어 기능(위치 제어에서 힘제어로의 전환 후, 소정의 힘에 도달하면 그 토크를 유지)
- No Gain Tuning / No Hunting / 고분해능 엔코더(10,000, 20,000[ppr])
- 주요 EtherCAT 마스터 업체들과 호환성 테스트 완료
(Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)
Ezi-SERVO
Key Point
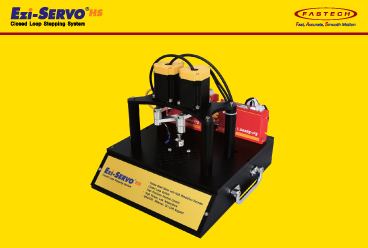
· 힘 제어 (Force Control)
- Ethernet 기반 제어기 내장형 Closed Loop Stepping System
- 힘 제어 기능(위치 제어에서 힘제어로의 전환 후, 소정의 힘에 도달하면 그 토크를 유지)
- 힘 제어가 필요한 장비(그리퍼, 누름, 압입, 체결 등)에 응용 가능
- 파라미터로 위치, 속도, 힘(%) 등 값 설정 가능
- PC(DLL 제공), PLC(I/O)를 통한 힘 제어 가능

Ezi-SERVO
Key Point
· Closed Loop Stepping System으로
기타 연주!
· 28 [mm] 초소형 모터+엔코더와
초소형 미니 드라이브 적용
- RS-485 기반의 제어기 내장형 Closed Loop Stepping System
- 28 [mm] 초소형 모터와 초소형 미니 드라이브 적용
- No Gain Tuning / No Hunting
- 분해능 엔코더 적용(16,000[ppr])
- PC 사용자를 위한 Windows Motion Library(DLL) 및 GUI 제공
- 최대 16축 연결
Ezi-SERVO
Key Point
· EtherCAT으로 igus robolink 제어
· 힘 제어(Force Control) 기능 지원
- Ezi-SERVOII EtherCAT과 OMRON 마스터를 사용한 igus 5축 다관절 로봇 제어
- igus Robolink 에 컴팩트한 4축 드라이브 적용하여 공간 절약 및 배선 절감
- 힘 제어 기능(위치 제어에서 힘제어로의 전환 후, 소정의 힘에 도달하면 그 토크를 유지)
- No Gain Tuning / No Hunting / 고분해능 엔코더(10,000, 20,000[ppr])
- 주요 EtherCAT 마스터 업체들과 호환성 테스트 완료
(Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)
Ezi-SERVO
Key Point
· EtherCAT으로 igus 3축 직교 로봇 제어
· 모터 + 엔코더 + 드라이브 + EtherCAT
일체형
- Ezi-SERVOII EtherCAT 과 OMRON 마스터를 사용한 igus 3축 직교 로봇 제어
- EtherCAT 마스터를 통한 직선, 원호 보간 제어
- 모터 + 엔코더 + 드라이브 + 네트워크(EtherCAT) 일체형 모터 적용으로 공간 절약 및 배선 절감
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 20,000 [ppr])
- Minimum Cycle time : 0.25[ms]
Ezi-SERVO
Key Point
· EtherCAT으로 igus 3축 직교 로봇 제어
· 모터 + 엔코더 + 드라이브 + EtherCAT
일체형
- Ezi-SERVOII EtherCAT 과 Beckhoff 마스터를 사용한 igus 3축 직교 로봇 제어
- EtherCAT 마스터를 통한 직선, 원호 보간 제어
- 모터 + 엔코더 + 드라이브 + 네트워크(EtherCAT) 일체형 모터 적용으로 공간 절약 및 배선 절감
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 20,000 [ppr])
- Minimum Cycle time : 0.25[ms]
Ezi-SERVO
Key Point
· EtherCAT으로 델타 로봇 제어
· 모터 + 엔코더 + 드라이브 + EtherCAT
일체형
- Ezi-SERVOII EtherCAT 과 Parker 마스터를 사용한 델타 로봇 제어
- EtherCAT 마스터를 통한 직선, 원호 보간 제어
- 감속기 장착 없이 높은 홀딩 토크 특성을 이용, 정지 시 헌팅 없이 구동 가능
- 모터 + 엔코더 + 드라이브 + 네트워크(EtherCAT) 일체형으로 공간 절약 및 배선 절감
- No Gain Tuning / No Hunting
- Minimum Cycle time : 0.25[ms]
Ezi-SERVO
Key Point
· EtherCAT으로 FESTO 4축 로봇 제어
· 모터 + 엔코더 + 드라이브 + EtherCAT
일체형
- Ezi-SERVOII EtherCAT과 ACS 마스터를 사용한 FESTO 4축 로봇 제어
- FESTO 4축 로봇 + 일체형 모터 적용으로 공간 절약 및 배선 절감
- 모터 + 엔코더 + 드라이브 + 네트워크(EtherCAT) 일체형
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 20,000 [ppr])
- Minimum Cycle time : 0.25[ms]
Ezi-SERVO
Key Point
· 힘 제어(Force Control)
- Ethernet 기반 제어기 내장형 Closed Loop Stepping System
- 힘 제어 기능(위치 제어에서 힘제어로의 전환 후, 소정의 힘에 도달하면 그 토크를 유지)
- 힘 제어가 필요한 장비(그리퍼, 누름, 압입, 체결 등)에 응용 가능
- 파라미터로 위치, 속도, 힘(%) 등 값 설정 가능
- PC(DLL 제공), PLC(I/O)를 통한 힘 제어 기능
Ezi-SERVO
Key Point
· 2축 3D 비전 검사 제어
- Ethernet 기반 제어기 내장형 Closed Loop Stepping System
- Ezi-Robo MR(2축 회전 로봇) 적용
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 20,000 [ppr])
- PC 사용자를 위한 Windows Motion Library(DLL) 및 GUI 제공
- 2 Port Switching HUB 내장으로 Daisy-Chain 연결 가능(최대 254축)
Ezi-SERVO
Key Point
· EtherCAT으로 FESTO 직교 로봇 제어
· 컴팩트한 4축 드라이브 사용으로 공간 절약
및 배선 절감
- Ezi-SERVOII EtherCAT 과 Omron 마스터를 사용한 직교 로봇 제어
- 컴팩트한 4축 드라이브 사용으로 공간 절약 및 배선 절감
- 중공축을 통한 공압 배선
- Minimum Cycle time : 0.25[ms]
- 주요 EtherCAT 마스터 업체들과 호환성 테스트 완료
(Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)
Ezi-SERVO
Key Point
· CC-Link 로 FESTO H-Portal 제어
- CC-Link 기반 Closed Loop Stepping System
- No Gain Tuning / No Hunting
- 저강성의 Belt & Pulley 시스템에서 감속기 장착 없이 높은 홀딩 토크 특성을 이용, 정지 시 헌팅 없이 구동 가능
- 고분해능 엔코더 적용(10,000, 20,000 [ppr])
- MITSUBISHI PLC와 100% 호환
- Remote Device 국으로 접속(1, 2국 점유)
Ezi-SERVO
Key Point
· 전동 Actuator + Hollow Rotary Index
Table + Gripper
· 힘 제어(Force Control) 기능 지원
- Ethernet 기반 제어기 내장형 Closed Loop Stepping System
- FESTO 전동 Actuator + 파스텍 Hollow Rotary Index Table + Gripper
- 힘 제어 기능(특정 위치에서 정해진 힘을 유지하며 이동, 물체에 접촉 시 힘을 유지)
- 힘 제어가 필요한 장비(그리퍼, 압입, 체결 등)에 응용 가능
- 중공축 회전 테이블의 중공을 이용한 배선
Ezi-SERVO
Key Point
· EtherCAT으로 델타 로봇 제어
- Ezi-SERVOII EtherCAT 과 Parker 마스터를 사용한 델타 로봇 제어
- EtherCAT 마스터를 통한 직선, 원호 보간 제어
- 감속기 장착 없이 높은 홀딩 토크 특성을 이용, 정지 시 헌팅 없이 구동 가능
- Minimum Cycle time : 0.25[ms]
- 주요 EtherCAT 마스터 업체들과 호환성 테스트 완료
(Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)
Ezi-SERVO
Key Point
· EtherCAT으로 Hexapod 제어
- Ezi-SERVOII EtherCAT 과 Parker 마스터를 사용한 Hexapod 제어
- Captive 타입 Linear Actuator + 엔코더 적용(분해능, 10,000 [ppr])
- No Gain Tuning / No Hunting
- Minimum Cycle time : 0.25[ms]
- 주요 EtherCAT 마스터 업체들과 호환성 테스트 완료
(Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)

Ezi-SERVO
Key Point
· 고속 단핏치 모션
· 20, 28 [mm] 초소형 모터+엔코더와
초소형 미니 드라이브 적용
- PLC 등 상위 제어기를 통한 제어(펄스열 입력)
- Closed Loop Stepping System
- 20, 28 [mm] 초소형 모터와 미니 드라이브 사용으로 공간 절약 및 배선 절감
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(4,000, 16,000 [ppr])
Ezi-SERVO
Key Point
· SKF 전동 실린더 고속 단핏치 모션
- Ezi-SERVOII EtherCAT과 Elmo 마스터를 사용한 SKF 전동 실린더 제어
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 20,000[ppr])
- Minimum Cycle time : 0.25[ms]
- 주요 EtherCAT 마스터 업체들과 호환성 테스트 완료
(Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)

Ezi-SERVO
Key Point
· Closed Loop Stepping System
- 펄스 입력 타입 Closed Loop Stepping System
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 20,000, 32,000 [ppr])
- 위치정밀도는 엔코더 정도에만 관계
(엔코더에 의한 위치 보정으로 서보시스템과 같이 위치오차가 항상 0입니다.)
Ezi-SERVO
Key Point
· EtherCAT으로 KOHZU 3축 스테이지 제어
비전 검사 장비
- Ezi-SERVOII EtherCAT과 SOFT MOTIONS & ROBOTICS 마스터를 사용한 KOHZU Stage 제어
- KOHZU 정밀 XYθ스테이지 + 28 [mm] 초소형 모터 적용
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(16,000[ppr])
- 위치정밀도는 엔코더 정도에만 관계(엔코더에 의한 위치 보정으로 위치오차가 항상 0입니다. )
- 위치정밀도 및 로스트모션의 향상으로 비전 검사 장비에 최적
Ezi-SERVO
Key Point
· 고속 단핏치 모션
· 20, 28 [mm] 초소형 모터+엔코더 적용
- RS-485 기반 제어기 내장형 Closed Loop Stepping System
- 20, 28 [mm] 초소형 모터와 미니 드라이브 사용으로 공간 절약 및 배선 절감
- PC 사용자를 위한 Windows Motion Library(DLL) 및 GUI 제공
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(4,000, 16,000[ppr])
- 최대 16축 연결
Ezi-SERVO
Key Point
· EtherCAT으로 FESTO Gantry 로봇 제어
- Ezi-SERVOII EtherCAT과 Elmo 마스터를 사용한 FESTO Gantry 로봇 제어
- 86 [mm] 모터 적용
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 20,000[ppr])
- Minimum Cycle time : 0.25[ms]
- 주요 EtherCAT 마스터 업체들과 호환성 테스트 완료
(Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)
Ezi-SERVO
Key Point
· EtherCAT으로 UVW Stage 제어
- Ezi-SERVOII EtherCAT과 SOFT MOTIONS & ROBOTICS 마스터를 사용한 UVW Stage 제어
- Mentor 스테이지 + 28 [mm] 초소형 모터 적용
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(16,000[ppr])
- Minimum Cycle time : 0.25[ms]
- 주요 EtherCAT 마스터 업체들과 호환성 테스트 완료
(Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)

Ezi-SERVO
Key Point
· Ezi-SERVO + Nidec Shimpo 유성 감속기
- 유성 감속기(Backlash 3분 이하) Closed Loop Stepping System
- 다양한 감속비(1:3, 1:5, 1:8, 1:10, 1:15, 1:25, 1:40, 1:50) 및 Helical Gear 로 형성
- 42, 56, 60, 86 [mm] 모터에 적용 가능
Ezi-SERVO
Key Point
· Ethernet으로 3축 KOHZU 박형 스테이지
제어
- Ethernet 기반 제어기 내장형 Closed Loop Stepping System
- KOHZU 정밀 스테이지 + 28 [mm] 초소형 모터 적용
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(16,000[ppr])
- PC 사용자를 위한 Windows Motion Library(DLL) 및 GUI 제공
- 2 Port Switching HUB 내장으로 Daisy-Chain 연결 가능(최대 254축)
Ezi-SERVO
Key Point
· 모터 + 엔코더 + 드라이브 + 컨트롤러 +
RS-485 일체형으로 공간 절약 및 배선 절감
- 모터 + 엔코더 + 드라이브 + 컨트롤러 + 네트워크(RS-485) 일체형
- PC 사용자를 위한 Window 기반 DLL 및 GUI 제공
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 16,000, 20,000 [ppr])
- 28, 42, 56, 60 [mm] 모터 사이즈 라인업
- 최대 16축 연결
Ezi-SERVO
Key Point
· 모터 + Absolute 엔코더 + 드라이브 +
컨트롤러 + RS-485 일체형으로 공간 절약
및 배선 절감
- 모터 + Absolute 엔코더 + 드라이브 + 컨트롤러 + 네트워크(RS-485) 일체형
- Absolute Encoder 적용(전원 ON, OFF 후에도 이전 위치 기억)
- IP65 등급의 방수 방진
- PC 사용자를 위한 Window 기반 DLL 및 GUI 제공
- No Gain Tuning / No Hunting
- 60[mm] 모터에 적용 가능
Ezi-SERVO
Key Point
· 힘 제어 (Force Control)
- Ethernet 기반 제어기 내장형 Closed Loop Stepping System
- 힘 제어 기능(위치 제어에서 힘제어로의 전환 후, 소정의 힘에 도달하면 그 토크를 유지)
- 힘 제어가 필요한 장비(그리퍼, 누름, 압입, 체결 등)에 응용 가능
- 파라미터로 위치, 속도, 힘(%) 등 값 설정 가능
- PC(DLL 제공), PLC(I/O)를 통한 힘 제어 기능
Ezi-SERVO
Key Point
· 힘 제어 (Force Control)
- RS-485 기반 제어기 내장형 Closed Loop Stepping System
- 힘 제어 기능(위치 제어에서 힘제어로의 전환 후, 소정의 힘에 도달하면 그 토크를 유지)
- 힘 제어가 필요한 장비(그리퍼, 누름, 압입, 체결 등)에 응용 가능
- 파라미터로 위치, 속도, 힘(%) 등 값 설정 가능
- PC(DLL 제공), PLC(I/O)를 통한 힘 제어 기능
Ezi-SERVO
Key Point
· 28 [mm] 초소형 모터 + 엔코더 + 드라이브
+ 컨트롤러 + RS-485 일체형으로 공간
절약 및 배선 절감
- 모터 + 엔코더 + 드라이브 + 컨트롤러 + 네트워크(RS-485) 일체형
- PC 사용자를 위한 Window 기반 DLL 및 GUI 제공
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(16,000 [ppr])
- 최대 16축 연결
Ezi-SERVO
Key Point
· EtherCAT으로 14축 동기 제어
(리드스크류+28 [mm] 초소형 모터 +
엔코더 일체형으로 커플링 없이 구동)
- Ezi-SERVOII EtherCAT과 SOFT MOTIONS & ROBOTICS 마스터를 사용한 14축 동기 제어
- 28 [mm] 초소형 Captive 타입 Linear Actuator + 엔코더 적용(분해능, 16,000 [ppr])
- 모터 종류 (Non-Captive / External / Captive)
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 20,000[ppr])
- 20, 28, 35, 42, 57, 86 [mm] 모터 사이즈 라인업
Ezi-SERVO
Key Point
· EtherCAT으로 4축 동기 제어
- Ezi-SERVOII EtherCAT과 SOFT MOTIONS & ROBOTICS 마스터를 사용한 4축 동기 제어
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 20,000 [ppr])
- Minimum Cycle time : 0.25[ms]
- 주요 EtherCAT 마스터 업체들과 호환성 테스트 완료
(Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)
Ezi-SERVO
Key Point
· EtherCAT으로 32축 동기 제어
- Ezi-SERVOII EtherCAT과 Beckhoff 마스터를 사용한 32축 동기 제어
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 20,000 [ppr])
- Minimum Cycle time : 0.25[ms]
- 주요 EtherCAT 마스터 업체들과 호환성 테스트 완료
(Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)
Ezi-SERVO
Key Point
· EtherCAT으로 고속 단핏치 모션
- Ezi-SERVOII EtherCAT과 Beckhoff 마스터를 사용한 고속 단핏치 모션
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 20,000 [ppr])
- Minimum Cycle time : 0.25[ms]
- 주요 EtherCAT 마스터 업체들과 호환성 테스트 완료
(Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)
Ezi-SERVO
Key Point
· EtherCAT으로 FESTO 직교 로봇 제어
- Ezi-SERVOII EtherCAT과 OMRON 마스터를 사용한 FESTO 직교 로봇 제어
- EtherCAT 마스터를 통한 직선, 원호 보간 제어
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 20,000 [ppr])
- Minimum Cycle time : 0.25[ms]
- 주요 EtherCAT 마스터 업체들과 호환성 테스트 완료
(Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)
Ezi-SERVO
Key Point
· WTR(Wafer Transfer Robot) 구동
- WTR에도 스텝 모터가 적용될 수 있음을 보여주는 예
- RS-485 기반 제어기 내장형 Closed Loop Stepping System
- 저강성의 Belt 구조 시스템에서 감속기 장착 없이 높은 홀딩 토크 특성을 이용, 정지 시 헌팅 없이 구동 가능
Ezi-SERVO
Key Point
· 힘 제어 (Force Control)
- RS-485 기반 제어기 내장형 Closed Loop Stepping System
- 힘 제어 기능(위치 제어에서 힘제어로의 전환 후, 소정의 힘에 도달하면 그 토크를 유지)
- 힘 제어가 필요한 장비(그리퍼, 누름, 압입, 체결 등)에 응용 가능
- 파라미터로 위치, 속도, 힘(%) 등 값 설정 가능
- PC(DLL 제공), PLC(I/O)를 통한 힘 제어 기능

Ezi-SERVO
Key Point
· CC-Link로 8축 고속 단핏치 제어
- CC-Link 기반 Closed Loop Stepping System
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 20,000 [ppr])
- MITSUBISHI PLC와 100% 호환
- Remote Device 국으로 접속(1, 2국 점유)

Ezi-SERVO
Key Point
· Closed Loop Stepping System
고객분들께 판매 및 대여 가능한 데모입니다.
자세한 내용은 파스텍 영업팀으로 연락주시면 안내해드리겠습니다.
- Ethernet 기반 제어기 내장형 Closed Loop Stepping System
- PC 사용자를 위한 Windows Motion Library(DLL) 및 GUI 제공
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 20,000 [ppr])
- 위치정밀도는 엔코더 정도에만 관계
(엔코더에 의한 위치 보정으로 서보시스템과 같이 위치오차가 항상 0입니다.)
Ezi-SERVO
Key Point
· AC 서보 + 스텝 모터 + I/O를 하나의
네트워크(Ethernet)로 제어
- Ethernet 기반 제어기 내장형 Closed Loop Stepping System (Ezi-SERVOII Plus-E)
- Ethernet 기반 1축 모션 제어기(Ezi-MOTIONLINK Plus-E)를 사용하여 각종 서보 드라이버에 직접 접속(3M 50pin)
- Ethernet 기반 16&32채널 Digital I/O Module(산업용 표준 e-CON / Terminal Block 커넥터 타입 채용)
- PC 사용자를 위한 Windows Motion Library(DLL) 및 GUI 제공
- 2 Port Switching HUB 내장으로 Daisy-Chain 연결 가능(최대 254축)
- 간단 제어, 배선절감, 모션 보드의 불필요(원가절감)
Ezi-SERVO
Key Point
· Ethernet으로 고속 단핏치 모션
· 20, 28 [mm] 초소형 모터+엔코더 적용
- Ethernet 기반 제어기 내장형 Closed Loop Stepping System
- PC 사용자를 위한 Windows Motion Library(DLL) 및 GUI 제공
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 20,000[ppr])
- 2 Port Switching HUB 내장으로 Daisy-Chain 연결 가능(최대 254축)
- 20, 28, 35, 42, 56, 60, 86 [mm] 모터 사이즈 라인업
Ezi-SERVO
Key Point
· Ethernet으로 고속 단핏치 모션
- Ethernet 기반 제어기 내장형 Closed Loop Stepping System
- PC 사용자를 위한 Windows Motion Library(DLL) 및 GUI 제공
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 20,000[ppr])
- 2 Port Switching HUB 내장으로 Daisy-Chain 연결 가능(최대 254축)
- 20, 28, 35, 42, 56, 60, 86 [mm] 모터 사이즈 라인업
Ezi-SERVO
Key Point
· EtherCAT으로 델타 로봇 제어
- Ezi-SERVOII EtherCAT 과 Parker 마스터를 사용한 델타 로봇 제어
- EtherCAT 마스터를 통한 직선, 원호 보간 제어
- 감속기 장착 없이 높은 홀딩 토크 특성을 이용, 정지 시 헌팅 없이 구동 가능
- Minimum Cycle time : 0.25[ms]
- 주요 EtherCAT 마스터 업체들과 호환성 테스트 완료
(Beckhoff, Omron, Trio, Elmo, ACS, NI, Parker, Soft Servo, LS, RSA, AJIN, COMIZOA, etc)

Ezi-SERVO
Key Point
· 모터 + 엔코더 + 드라이브 일체형으로
공간 절약 및 배선 절감
- 모터+ 엔코더 + 드라이브 일체형
- Pulse 입력 기반 Closed Loop Stepping System
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 20,000 [ppr])
- 42, 56, 60 [mm] 모터 사이즈 라인업

Ezi-SERVO
Key Point
· 모터 + 엔코더 + 드라이브 + 컨트롤러 +
RS-485 일체형으로 공간 절약 및 배선 절감
- 모터 + 엔코더 + 드라이브 + 컨트롤러 + 네트워크(RS-485) 일체형
- PC 사용자를 위한 Window 기반 DLL 및 GUI 제공
- No Gain Tuning / No Hunting
- 고분해능 엔코더 적용(10,000, 16,000, 20,000 [ppr])
- 28, 42, 56, 60 [mm] 모터 사이즈 라인업
- 최대 16축 연결

Ezi-SERVO
Key Point
· 외부 Linear Scale Encoder를 이용한
Closed Loop Stepping System
- RS-485 기반 제어기 내장형 Closed Loop Stepping System
- 외부 Linear Scale Encoder 적용(분해능 1[µm])
- No Gain Tuning / No Hunting
Ezi-SERVO
Key Point
· 고속 단핏치 Belt & Pulley 구동
- RS-485 기반 제어기 내장형 Closed Loop Stepping System
- 저강성의 Belt & Pulley 시스템에서 감속기 장착 없이 높은 홀딩 토크 특성을 이용, 정지 시 헌팅 없이 구동 가능