


Specifications of Motor
| Model Name | HB60 Series | HB85 Series | HB130 Series | |
|---|---|---|---|---|
| RB-HB60-05-42XL | RB-HB85-05-56L | RB-HB130-05-60L | ||
| Type of output table supporting bearing | Ball Bearing | |||
| Permissible speed | [N·m] | 2.7 | 7 | 12.8 |
| Inertia moment | J :[Kg·m²] | 500 x 10-7 | 3,800 x 10-7 | 15,500 x 10-7 |
| Permissible speed | [rpm] | 300 | 300 | 300 |
| Gear ratio | 1:5 | 1:5 | 1:5 | |
| Maximum holding torque | [N·m] | 2.2 | 5.7 | 7.8 |
| Repetitive positioning accuracy | arcsec | ±30(0.0083˚) | ±30(0.0083˚) | ±30(0.0083˚) |
| Lost motion | [arcmin] | 6 | 6 | 6 |
| Angular transmission error | [arcmin] | 10 | 10 | 10 |
| Permissible axial load | [N] | 100 | 200 | 500 |
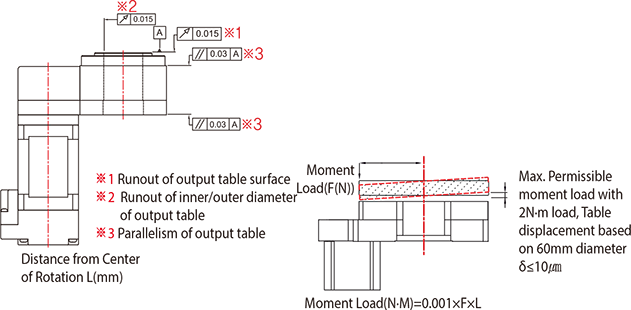
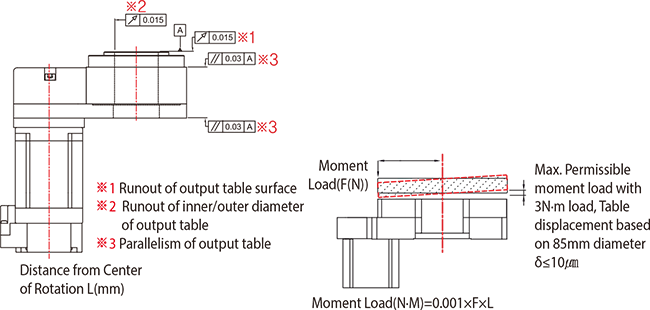
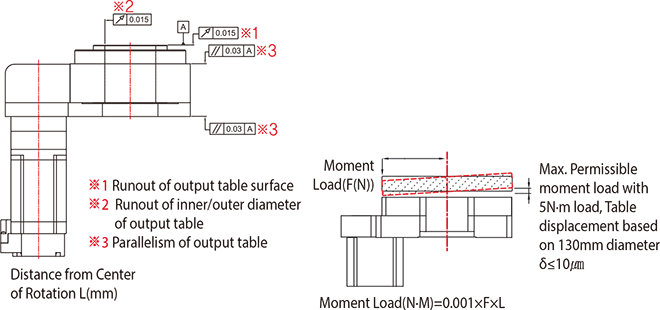
| Permissible moment load | [N·m] | 2 | 3 | 5 |
| Runout of output table surface | [mm] | 0.015 | 0.015 | 0.015 |
| Runout of output table inner/outer diameter | [mm] | 0.015 | 0.015 | 0.015 |
| Parallelism of output table | [mm] | 0.03 | 0.03 | 0.03 |
| Degree of protection*1 | IP40 (IP20 for motor connector) | |||
| Mass | [kg] | 1.1 | 3.1 | 4.0 |
*1 : IP20 for motor connector
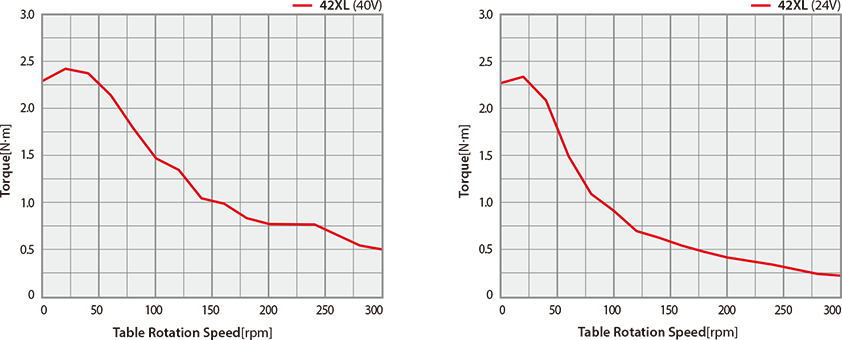
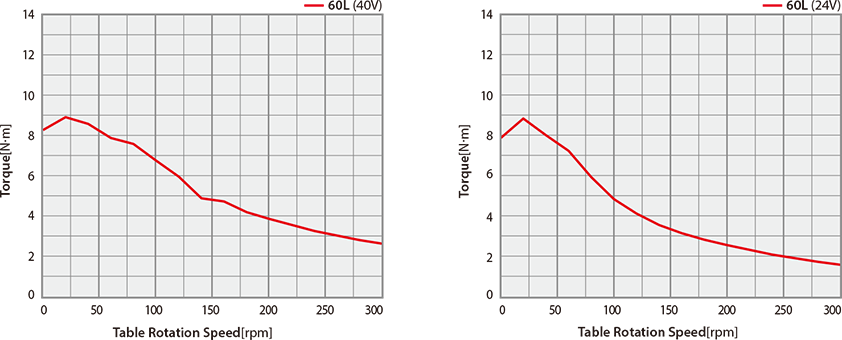
Torque Graph
RB-HB60-05-42XL
| Applicable Model | |||
|---|---|---|---|
| 40V | |||
| Ezi-SERVOⅡ EtherCAT | Ezi-SERVOⅡ Plus-E | Ezi-SERVOⅡ CC-Link | Ezi-SERVO ST |
| 24V | |||
| Ezi-SERVOⅡ EtherCAT MINI | Ezi-SERVOⅡ EtherCAT 4X | Ezi-SERVOⅡ EtherCAT 8X | Ezi-SERVOⅡ Plus-E MINI |
RB-HB85-05-56L
| Applicable Model | |||
|---|---|---|---|
| 40V | |||
| Ezi-SERVOⅡ EtherCAT | Ezi-SERVOⅡ Plus-E | Ezi-SERVOⅡ CC-Link | Ezi-SERVO ST |
| 24V | |||
| Ezi-SERVOⅡ EtherCAT MINI | Ezi-SERVOⅡ EtherCAT 4X | Ezi-SERVOⅡ EtherCAT 8X | Ezi-SERVOⅡ Plus-E MINI |

RB-HB130-05-60L
| Applicable Model | |||
|---|---|---|---|
| 40V | |||
| Ezi-SERVOⅡ EtherCAT | Ezi-SERVOⅡ Plus-E | Ezi-SERVOⅡ CC-Link | Ezi-SERVO ST |
| 24V | |||
| Ezi-SERVOⅡ EtherCAT MINI | Ezi-SERVOⅡ EtherCAT 4X | Ezi-SERVOⅡ EtherCAT 8X | Ezi-SERVOⅡ Plus-E MINI |
Dimensions of Motor
RB-HB60-05-42XL-A-ㅁ
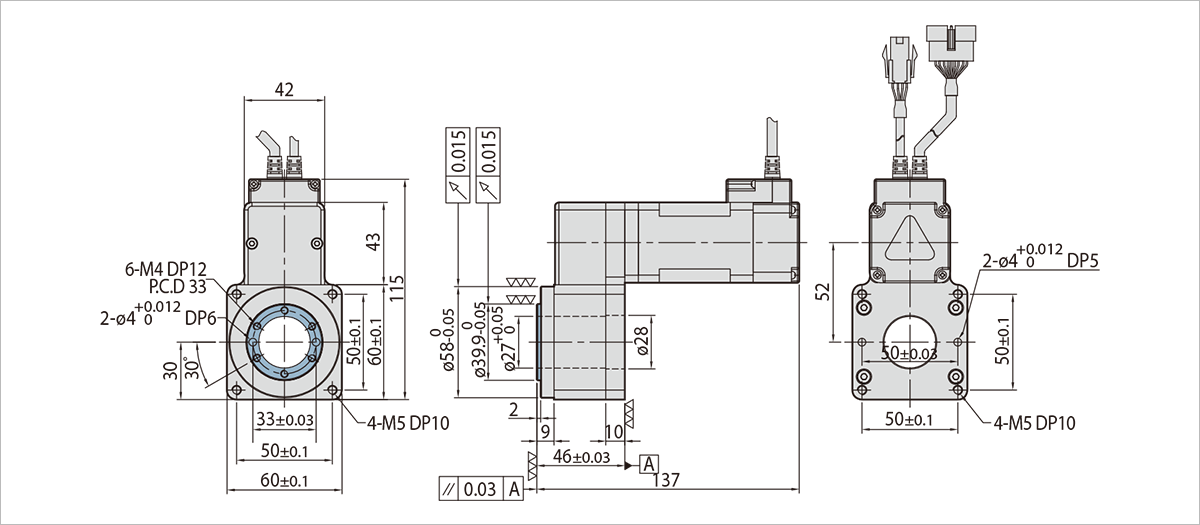
※ The above drawing is made based on EzM series.
ㅁis the type of drive.
ㅁis the type of drive.
RB-HB85-05-56L-A-ㅁ
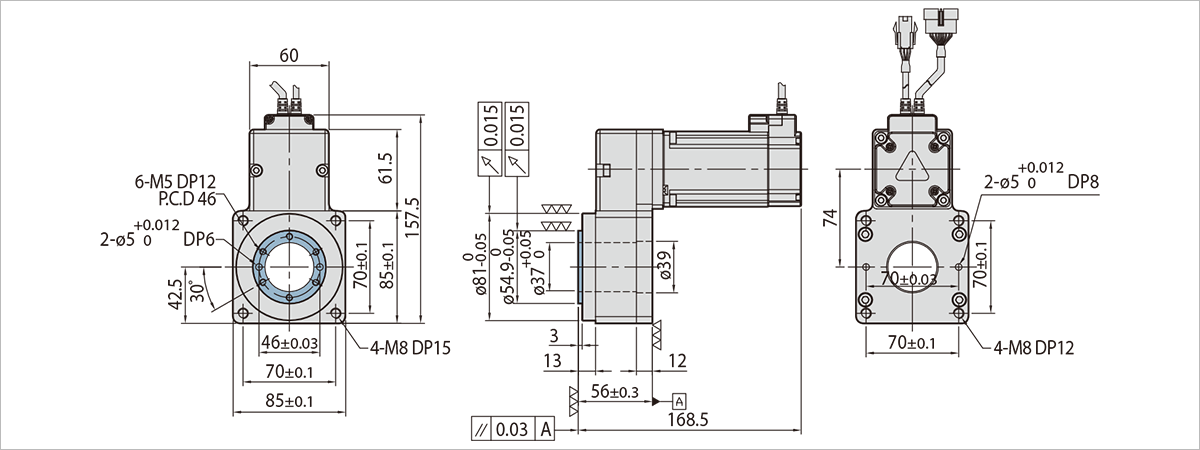
※ The above drawing is made based on EzM series.
ㅁis the type of drive.
ㅁis the type of drive.
RB-HB130-05-60L-A-ㅁ
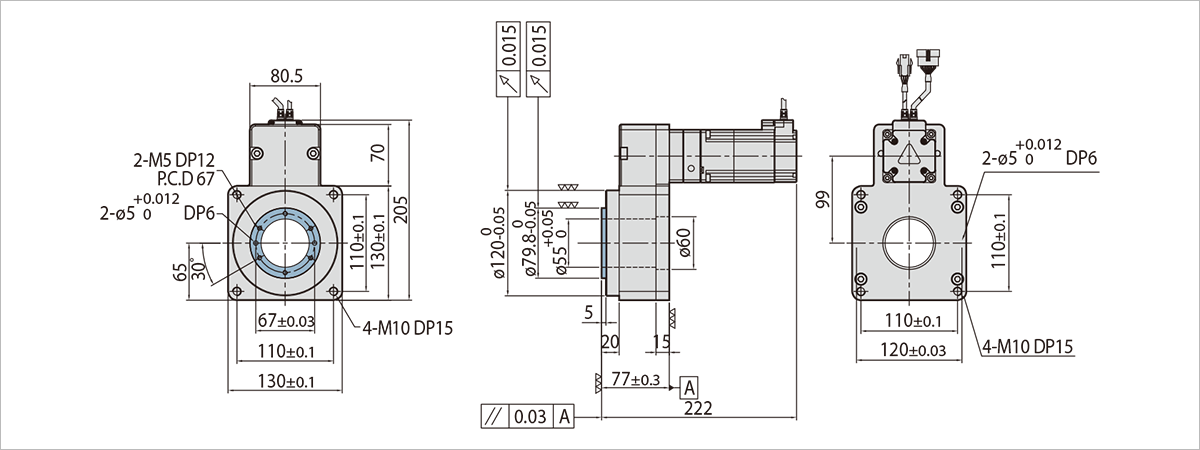
※ The above drawing is made based on EzM series.
ㅁis the type of drive.
ㅁis the type of drive.