


Setting
- 1. Status
-
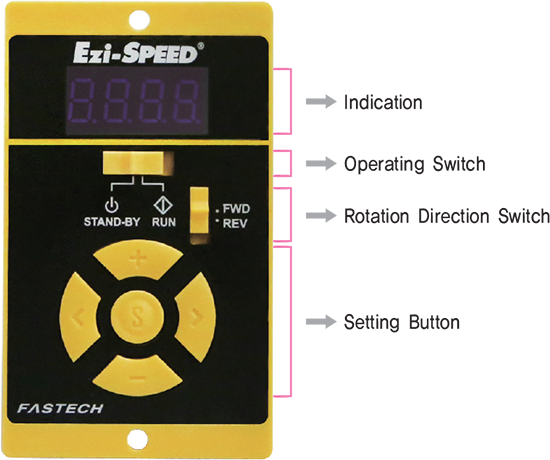
Display Detail Indication Display the monitor, parameter, alarm, warning. etc Operating Switch The motor is started by setting it to the “RUN” position.
Setting it to the “STAND-BY” position stop the motorRotation Direction Switch Change the rotation direction of the motor with rotation direction switch. Setting Button Changes the speed and parameters.
The value is set when the “S” button is pressed after changes are made.Protective Earth Terminal Ground either one of the protective earth terminals. Sensor Connector CN3 Connects to the signal connector of the motor. Motor Connector CN2 Connects to the power connector of the motor. I/O Signal Connector CN4 Connects with the I/O signals Main Power Connector CN1 Connects to the main power supply and regenerative resistor.
- 2. Extended Functions
- Ezi-SPEED can be perform various setting by operation button
-
Operating Mode Details Monitor Mode Speed, Actual speed, Load factor, Alarm record and reset, Warning record and reset, operating data number, I/O monitor Data Mode Data 8 points, Operating speed, acceleration time, Deceleration time, Operating data reset Parameter Mode The acceleration/deceleration time, The overload alarm detection time, The speed upper limit and lower limit, speed reduction ratio, speed increasing ratio, panel initial view, Alarm of “Run” condition at power on, external operation signal input, External input function, External output function, Speed attainment width, Parameter mode reset NVM saving mode Parameter save to NVM
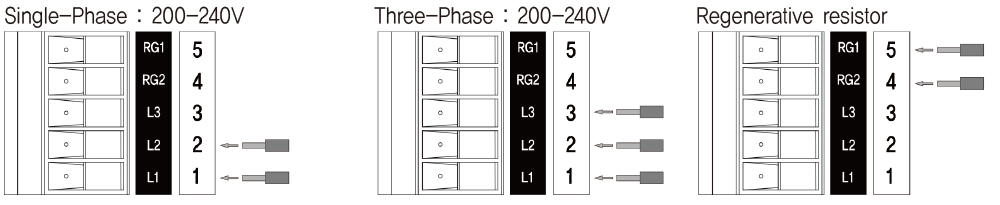
- 3. Main Power Connector(CN1)
- 4. Applicable Lead Wire Size
- AWG18 ~ 14(0.75 ~ 2.0mm2)
Operating
- 1. Running the motor
- Set the operation switch to the “RUN”, the motor to start rotating.
- 2. Adjust the speed
- Pressing the
 button, the speed increase by 1 r/min,
button, the speed increase by 1 r/min, - Pressing the
 button, the speed decrease by 1 r/min.
button, the speed decrease by 1 r/min.
- 3. Determining the speed
- - Set
Pressing the button, the rotation speed is determined.
button, the rotation speed is determined.
When the display is blinking, the rotation speed has not set. - - Confirmation
Prevents the undesired changes in the speed,
Press the button for 5 seconds or more when STAND-BY mode when “LOCK” appears, the lock function is activated.
- 4. Stopping the motor
- Setting the operation switch to the “STAND-BY” side causes the motor to decelerate to a stop.
Setting the operation switch again to the “RUN” side causes the motor to start rotating at the set rotation speed.
- 5. Changing the rotation direction
- Change the rotation direction of the motor (gearhead) using the rotation direction switch. The rotation direction can be changed while operating. With the combination type, the rotation direction of the gearhead output shaft varies depending on the rear ratio of the gearhead.
Operation by I/O Signals
- 1. Operation Method
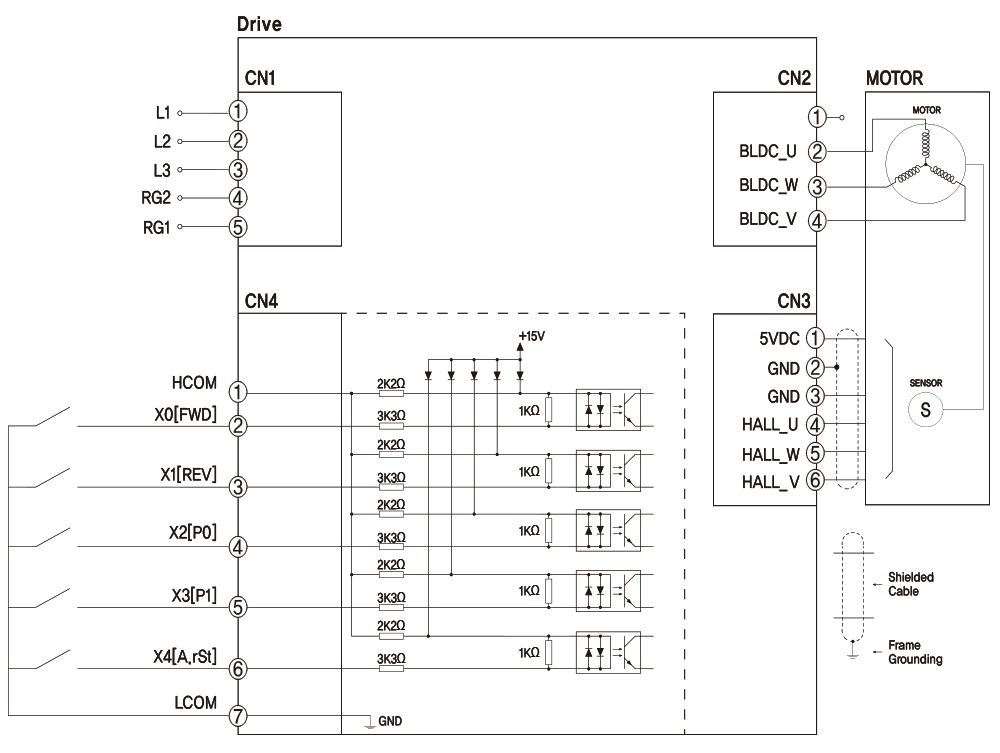
- - Using the built-in power supply in the driver, the motor is operated through external signals.
- Connect Pins the I/O signal connector as in the figure of the righ.
- When operating using external signals, change the parameter setting in the “external operation signal input” to “on”. Refer to Manual.
- Using the external I/O signals, the motor can be operated 8-Speeds data. -
Pin No. Terminal Name Input/Output Signal Name Description 1 HCOM Common - Input signal common : Sink Logic : +24V, Source Logic : 0V (GND) 2 X0 Input [FWd] The motor rotates is FWD direction during signal “ON” 3 X1 Input [rEv] The motor rotates is REV direction during signal “ON” 4 X2 Input [P0] Select the operating data. 5 X3 Input [P1] Select the operating data. 6 X4 Input [A.rSt] Reset the alarm. 7 LCOM Common - Input signal common 8 Y0+ Output [SPd] For every rotation of the motor, 30 pulses are output 9 Y0- Output 10 Y1+ Output [AL.on] It turns off when an alarm is generated(Normally closed). 11 Y1- Output 12 Y2+ Output [MovE] It turns on when the motor is operated(Normally opened). 13 Y2- Output -
- ※ [ ] Function in [ ] is assigned at shipment.
- ※ Can be assigned required functions to 5 input signals(X0~X4) and 3 output signals(Y0~Y2)
- · Input signals : Can be used 5 functions out of FWd(CW rotation), rEv(CCW rotation),
P0(operation data 1), P1((operation data 2), P2(operation data 2), A.rst(Alarm reset), E.Err(External alarm), H-Fr( Motor activation / deactivation) - · Output signals : Can be used 3 functions out of SPd(Speed output), AL.on( Alarm output), AL.ov(Overvoltage alarm output),
OvLd(Overload alarm output), Mov(Motor operation output), vA(Speed attainment alarm), WnG(Warning alarm)
- 2. Applicable Lead Wire Size
- AWG26 ~ 20(0.14 ~ 0.5mm2)
- 3. Timing Chart
- In case of parameter “external operation signal input” to “on” and the rotation direction switch is set to “FWD”.
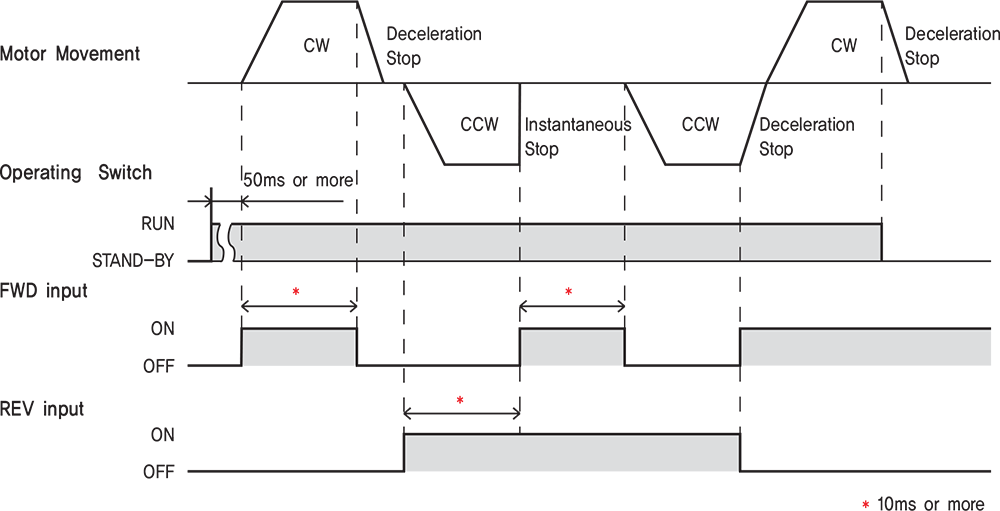
- · The motor rotates when either FWD input or REV input is set to “ON”.
- · The motor instantaneous stop when FWD input and REV input is set to “ON” at the same time.
- 4. Example of connection using Switches or Relays
- This is an example of connection when operating Ezi-SPEED using contact switches such as switches or relays.
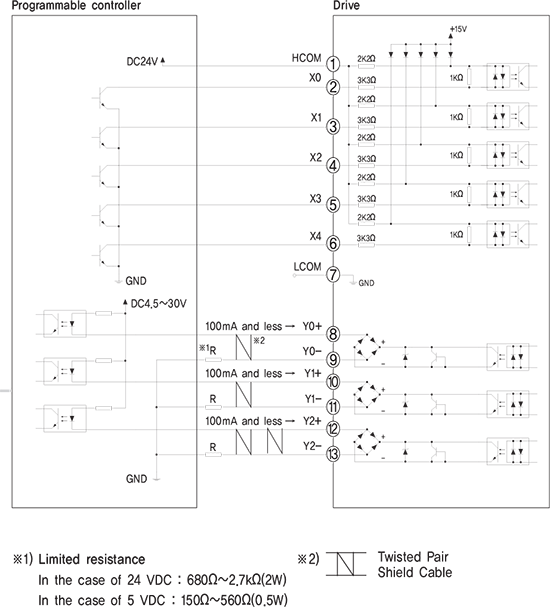
- 5. Connection example for I/O signals and programmable controller
- This is connection example when the motor is operated using a transistor output type programmable controller.
- · SINK LOGIC
-
- ※ For the Y0, Y1 and Y2, be sure to keep the current value at 100mA or less,
If the current exceeds this value, connect the limiting resistor R.
- ※ For the Y0, Y1 and Y2, be sure to keep the current value at 100mA or less,
· SOURCE LOGIC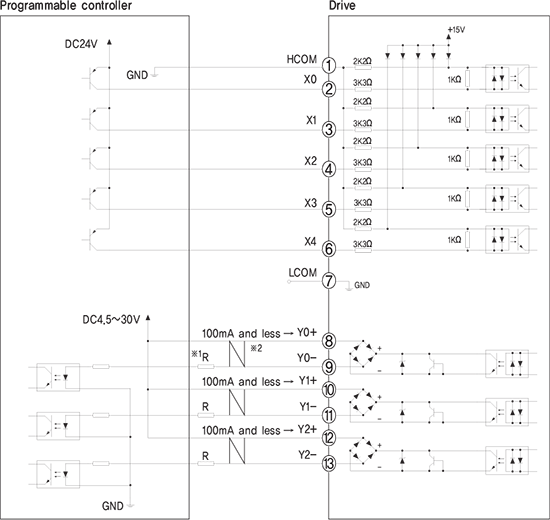
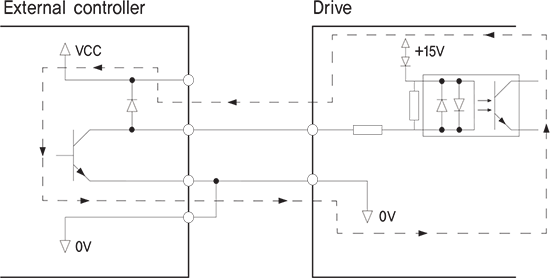
- 6. In the case of using a external controller with a built-in clamp diode
- If a external controller with a built-in clamp diode is used, a leakage path may form and cause the motor to operate even when the external controller power is off, as long as the drive power is on. Since the power capacity of the controller is different from that of the drive, the motor may operate when the external controller and drive powers ate turned on or off simultaneously. When powering down, turn off the drive power first, followed by the external controller power. When powering up, turn off the external controller power first, followed by the drive power.
- When changing from the present speed to the new speed,
the acceleration time and deceleration time set in the next operation data number are used. 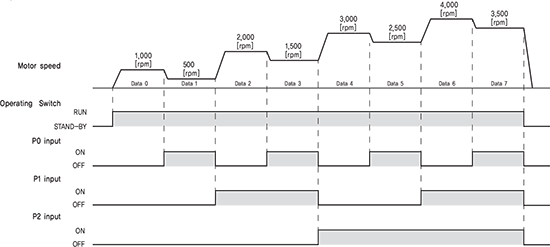
- 7. 8-Speed Operation(In the case of the “external operation signal input” parameter is set to “ON”)
- ① Set the operation switch to the “RUN” side.
- ② Select the operation data number using the P0, P1 and P2 inputs.
- ③ When either of the FWD input or REV input is turned ON, the motor will rotate.
- ④ Switch the operation data number using the P0, P1 and P2 inputs.
- ⑤ When the FWD input or REV input which has been turned ON is turned OFF, the motor will stop.
-
Operation data No. P0 P1 P2 Rotation speed[rpm] 0 OFF OFF OFF 1,000 1 ON OFF OFF 500 2 OFF ON OFF 2,000 3 ON ON OFF 1,500 4 OFF OFF ON 3,000 5 ON OFF ON 2,500 6 OFF ON ON 4,000 7 ON ON ON 3,500 -
- ※ Setting speed value is example, can change to need speed.
Status Monitor LED
- 1. Monitor Mode Display
-
Item Display Description Setting speed display and speed adjustment[rpm] 50 Display of setting motor speed Actual speed[rpm] 0 Monitors the actual speed of motor.
Monitors the rotation speed of gear output shaft or conveyor transfer speed when the “speed reduction ratio” parameter is set.
When the “speed increasing ratio” parameter is set, the rotation speed being increased by external mechanism is displayed.Load factor(%) L. 0 Monitors the current load factor based on the rated torque being 100%.
Monitor is load factor of motor shaft. No gearhead type.
In case of gearhead mounted motor type, permissible torque is different by reduction ratio of gearhead.
Please use checking permissible torque limit of gearhead.Alarm record display and record reset AL.rc Monitors the alarm record.
You can check alarm record and delate alarm record.Warning record display and record reset Wn.rc Monitors the warning record.
You can check warning record and delate warning record.Operation data number oP.d- Monitors the operation data No. current selected I/O monitor io You can check the ON/OFF status of I/O signal of drive.
If the signal is ON, the corresponding LED is lit. if the signal is OFF, the LED is unlit .
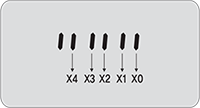
Input signals
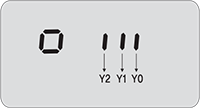
Output signals
- 2. Protection functions and LED display
-
Alarm Code Alarm type Cause Remedial action Alarm reset [AL.--] Alarm record delate - - - [AL.UV.] Under voltage The power supply voltage became lower than approximately 60% of the rated voltage 1. Check the power supply voltage
2. Check the wiring of the power supply cablePossible [AL.oV.] Over voltage 1. The power supply voltage exceeded approximately 120% of the rated voltage.
2. Vertical drive(gravitational operation) was performed or a load exceeding the permissible load inertia was driven.1. Check the power supply voltage.
2. If this alarm occurs during operation, reduce the load or make the acceleration/deceleration time longer.Possible [AL.oT.] Overheat The temperature inside drive exceeded the alarm detection temperature. Review the ambient temperature Possible [AL.oC] Overcurrent Excessive current has flown through the drive due to ground fault. etc Check the wiring between the drive and motor for damage Possible [AL.SF] Speed feedback Actual speed and set speed are different. 1. Check the power supply voltage.
2. Check the loadPossible [AL.SS] Sensor error
(Hall sensor)The motor sensor signal line experienced an open circuit during operation or the motor signal connector came off. Check the wiring between the drive and motor. Possible [AL.oS] Overspeed The rotation speed of the motor output shaft exceeded approximately 4800rpm 1. Reduce the load
2. Review the operation pattern such as acceleration/deceleration time.Possible [AL.oL] Overload 1. A load exceeding the continuous duty region was applied to the motor for the time exceeded the value set in the “The overload alarm detection time” parameter.
2. The motor was started running under the state that the motor temperature was low.Possible [AL.oP] Operation at power-on When the “external operation signal input” parameter was set to “OFF”, while the operation switch was set to the “RUN” side, the power was turned on again. Set the operation switch to the “STAND-BY” side from the “RUN” side. Next press “S” button. Possible When the “external operation signal input” parameter was set to “ON”, while the FWD input or REV input was turned ON, the power was turned on again. 1. Set the operation switch to the “STAND-BY” side from the “RUN” side.
2. Turn the FWD input or REV input from ON to OFF.[AL.Et] External Error
(From external input signal)The motor instantaneous stop when EXT-ERROR(Stop) input. 1. Check the EXT-ERROR input.
2. Change status from activated to deactivated.Possible
Connecto
- 1. I/O Signal Connector(In/Out)
-
No. Function I/O 1 HCOM Common 2 X0 Input 3 X1 Input 4 X2 Input 5 X3 Input 6 X4 Input 7 LCOM Common -
No. Function I/O 8 Y0+ Output 9 Y0- Output 10 Y1+ Output 11 Y1- Output 12 Y2+ Output 13 Y2- Output 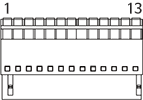
- 2. Motor Connector(Motor)
-
No. Function 1 - 2 BLDC_U 3 BLDC_W 4 BLDC_W -

- 3. Sensor Connector(Sensor)
-
No. Function 1 +5V 2 Shield 3 GND 4 HALL_U 5 HALL_V 6 HALL_W 
- 4. Main Power Connector(Power)
-
No. Function 1 L1 2 L2 3 L3 4 RG2 5 RG1 
-
- · Connecting to RG1, RG2 terminals when use a regenerative resistor.
- · A regenerative resistor can be used when the deceleration time is short or when the large inertia is driven by providing a regenerative resistor contact terminal.
- · Please refer to manual about detail spec of a regenerative resistor.
Cable connector
-
Use Item Specification Manufacturer CN1 : Main power connector(PWR) Terminal Block CPF5.08-05P STELVIO CN4 : I/O Signal Connector(IN/OUT) Terminal Block 15EDGKD-13P DEGSON -
- This connector is provided with Ezi-SPEED. When purchasing optional cables, we don’t provided cable connector.