
- 1. Network Based Motion Control
-
Ezi-STEPⅡ EtherCAT은 고속 이더넷 (100Mbps, Full-Duplex)기반 Fieldbus인 EtherCAT을 지원하는 스텝핑 모터 제어 시스템입니다.
Ezi-STEPⅡ EtherCAT은 CAN Application layer over EtherCAT(COE)을 지원하는 EtherCAT Slave 모듈입니다. CiA 402 Drive Profile을 지원하며, Profile Position Mode, Homing Mode, Cyclic Synchronous Position Mode를 지원합니다.

- 2. Torque Improvement(모터 전압 상승 및 모터 전류 설정)
-
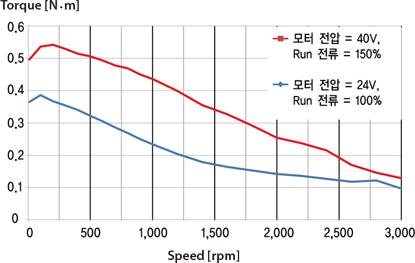
Ezi-STEPⅡ 시리즈는 드라이브 내부에 모터에 공급되는 전압을 승압시키는 회로가 있어 모터 전압이 드라이브에 입력되는 전압보다 높습니다. 높은 모터 전압에 의해 고속에서의 토크가 증가되었습니다. 또한 Run 전류를 150%까지 설정할 수 있으며 이에 따라 저속에서의 토크가 증가됩니다.
Ezi-STEPⅡ 시리즈는 전 속도 구간에서 토크가 30% 정도 향상이 가능합니다.
-
※ 저속 및 고속에서의 토크는 약 30% 향상
측정 조건 : 드라이브 = Ezi-STEPⅡ-EC-42L
모터 전압 = 40VDC
입력 전압 = 24VDC
- 3. Microstep and Filtering(고정도 마이크로 스텝 기능 및 Filtering)
-
고성능 MCU에 의해 기본 분해능인 1.8°를 최대 1/250(0.0072°)까지 분할 가능합니다.
기존의 드라이브와 달리, Ezi-STEP은 PWM 제어를 매 25 μsec 마다 수행하기 때문에 보다 정밀한 전류 제어가 가능함에 따라, 고정도 마이크로 스텝이 가능합니다.
또한 극저속 영역에서 입력 펄스의 Software Filtering 기법에 의해 부드러운 운전이 가능합니다.
- 4. Software Damping(Software Damping에 의한 진동 억제 및 고속운전)
-
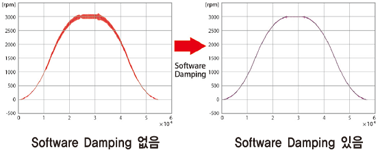
마이크로 스텝 구동 시 스텝핑 모터에 가하는 전류는 정확한 정현파 형태지만, 실제로 모터 마그네틱 플럭스의 비선 형성, 고속 영역에서의 역기전력 증가에 의한 모터 전류의 감소, 모터 상간 전압의 감소 등 모두 스텝핑 모터의 진동을 유발하는 원인입니다. Ezi-STEP은 이 비선형성을 고성능 MCU에 의해 감지하여, 이를 보상하기 위해 모터의 자극 위치에 대한 전류의 위상을 제어함으로써 진동 억제가 가능합니다. 스텝핑 모터의 진동 억제가 가능함에 따라, 고속 영역에서의 운전이 가능합니다.
-
※ 100,000 [pulse/회전] 엔코더를 이용한 실제 측정 속도임.
- 5. 고속 운전 특성의 향상
-
드라이브 내부에서 모터에 인가하는 전압을 상승시키기 때문에 고속에서 역기전력에 의해 실제 모터에 걸리는 전압의 감소에 따른 토크 저하를 방지함으로써, 고속운전이 가능합니다. 또한 Software Damping에 의해 진동을 대폭 줄일 수 있어 고속에서의 탈조를 방지합니다.
-
※ 적용가능 모델
Ezi-STEPⅡ-EC-42 series
Ezi-STEPⅡ-EC-56 series
Ezi-STEPⅡ-EC-60 series

