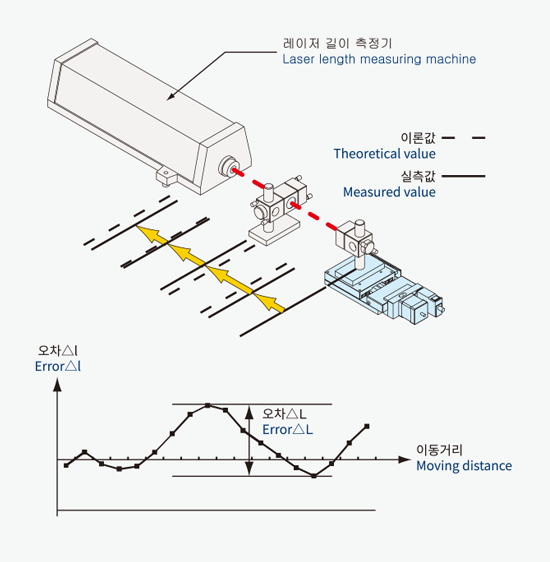
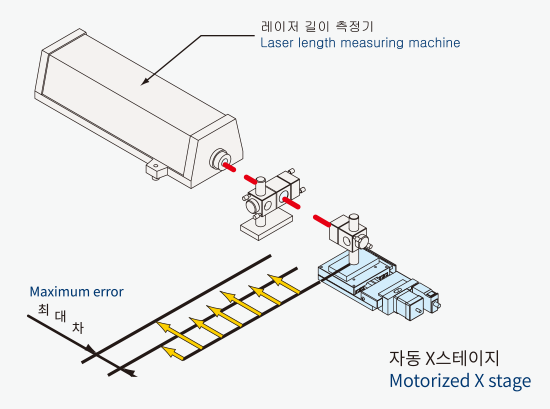
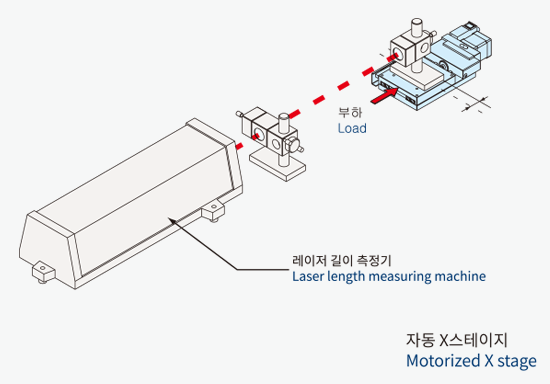
- 1. 누적 리드 오차(위치 결정 정도)
- 기준점(원점)에서 한 방향으로 일정 간격으로 순차적으로 위치 결정을 하고 각각의 위치 결정 지점에서의 측정값(기준점에서 실제로 이동한 위치)과 지령값(지령한 실제로 이동 해야 하는 위치)과의 차이를 테이블의 이동범위에서 측정하고, 그 차이의 최대 차이값을 누적 리드 오차(위치 결정오차)라고 합니다.
- 2. 반복 위치 결정 정도
- 임의의 한 점(기준으로 하는 측정점)에서 같은 방향으로 위치결정을 하고 그 위치를 측정합니다. 이 측정점에 대해서 7회 측정을 하고 그 최대차이를 구합니다. 이 조작을 소정의 위치에서 하고 구한 값의 최대값의 1/2에 (±)를 붙인 값을 반복 위치 결정 정도 라고 합니다. 단, 소정의 위치 란 X 스테이지는 중앙과 양끝의 3점이며, 스위벨 및 Z 스테이지 중앙의 1점으로 합니다.
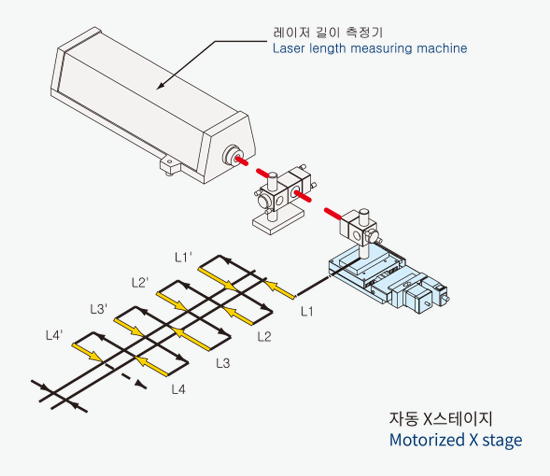
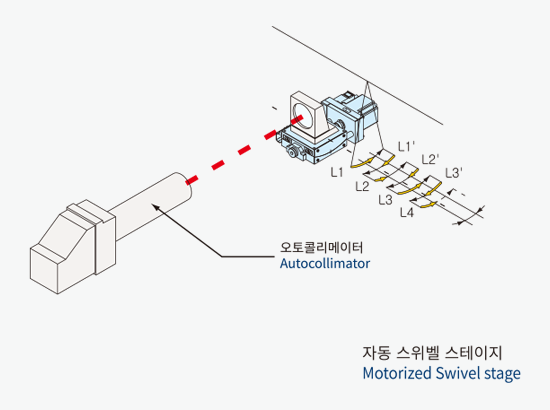
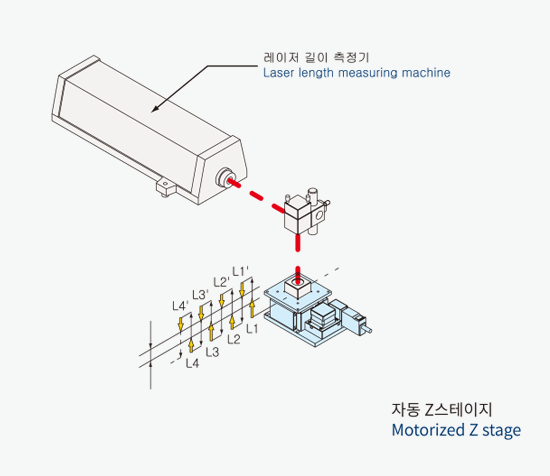
- 3. 로스트 모션
- 소정의 위치(기준으로 하는 측정위치)에 대해서 정방향(모터회전 CW 방향)부터 위치 결정하고 그 위치를 측정합니다.(L1) 그리고 정방향으로 이동한 후, 부방향(모터 회전 CCW 방향)으로 같은 양의 지령을 주고 이동시켜 위치결정을 하고 그 위치를 측정 합니다.(L1’) 그리고 부방향으로 이동한 후 정방향으로 같은 양의 지령을 주고 이동시켜 위치결정을 하고, 그 위치를 측정합니다.(L2) 이 위치결정 측정을 정방향 · 부방향으로 7회 실시하고, 각각의 차이를 구해 그 값을 평균화한 소정의 위치 안에서의 최대값을 로스트 모션이라고 합니다. 단, 소정의 위치 란 X 스테이지는 중앙과 양끝의 3점이고, 스위벨 및 Z 스테이지는 중앙의 1점으로 합니다.
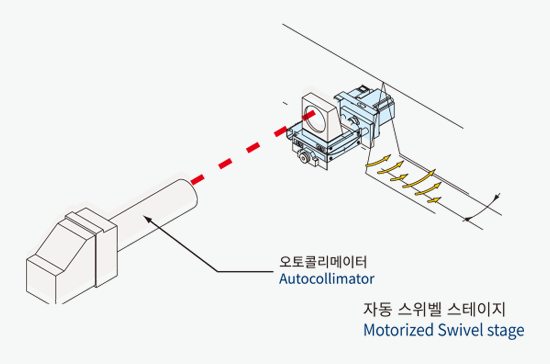
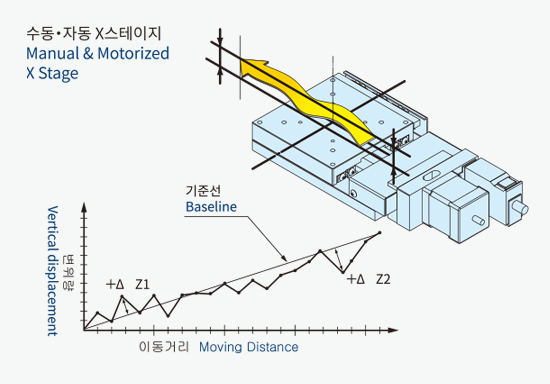
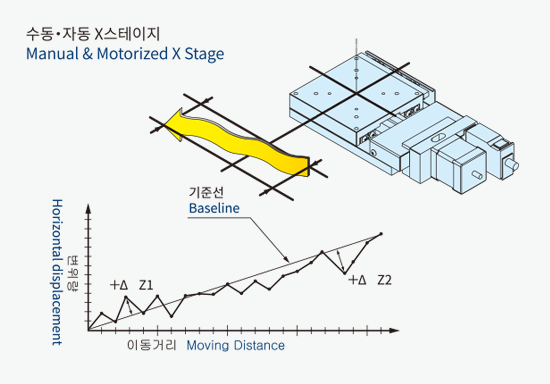
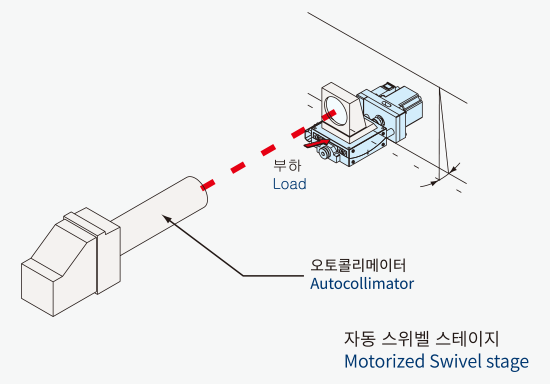
- 4. 진직도(수직 성분) / 진직도(수평 성분)
- 기준 위치에서 한 방향으로 순차적으로 위치 결정을 실시하고 각각의 위치에서의 수직 방향(Vertical), 수평 방향(Horizontal) 변위 길이와 기준 위치와의 차이를 측정하고, 측정값의 시작점 · 끝점을 연결한 직선에서의 변위 최대 차이를 진직도라고 합니다. 진직도는 수직 성분과 수평 성분이 있습니다. 각각의 성분 최대값을 스테이지의 진직도 라고 합니다.
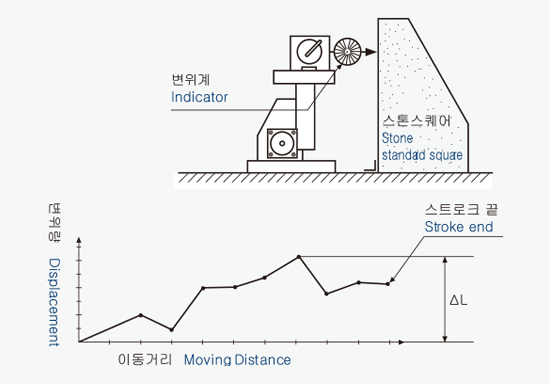
- 5. 수직도(2 방향)
- 테이블 상면에 취부한 변위계로 Stone Square의 수직 기준면을 테이블의 이동범위 내에서 일정 방향으로 움직이며 생기는 변위의 최대값을 수직도라고 합니다.
- 6. 백래쉬
- 테이블을 ORG 위치 또는 이동범위의 중앙을 기준 위치로 하고, 기준 위치로 이동할 때에 보내는 방향과 같은 방향으로 규정된 부하를 가한 후, 부하를 해제합니다. 기준 위치와 부하를 해제한 후의 위치 차이를 백래쉬라고 합니다.
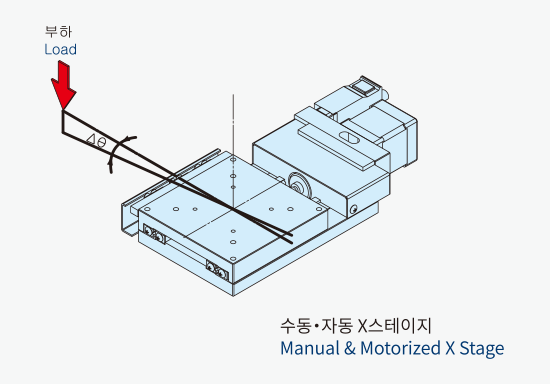
- 7. 모멘트 하중(롤 강성)
- 테이블을 ORG 위치 또는 이동범위의 중앙에 위치시키고, 임의의 모멘트 하중(축외하중) 을 가했을 때의 테이블 상면의 변위한 각도(단위 N·cm 당)를 모멘트 하중이라고 합니다.
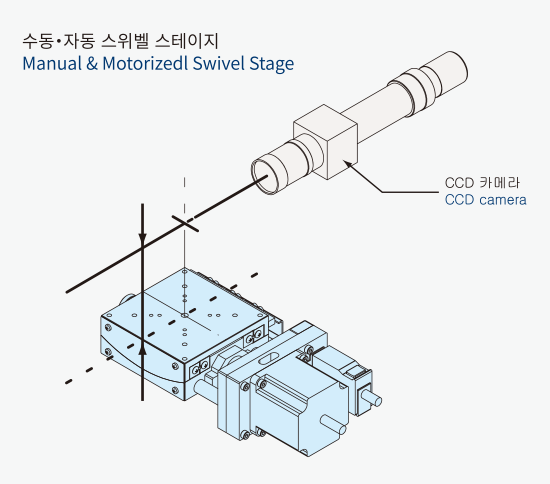
- 8. 회전 중심 변위량
- 테이블 윗방향의 실제 회전축에 기준점을 설치하고, 테이블을 전체 이동 범위 내에서 움직였을 때, 기준점의 떨림을 CCD카메라로 측정하여 그 떨림양을 회전 중심 변위량 이라고 합니다
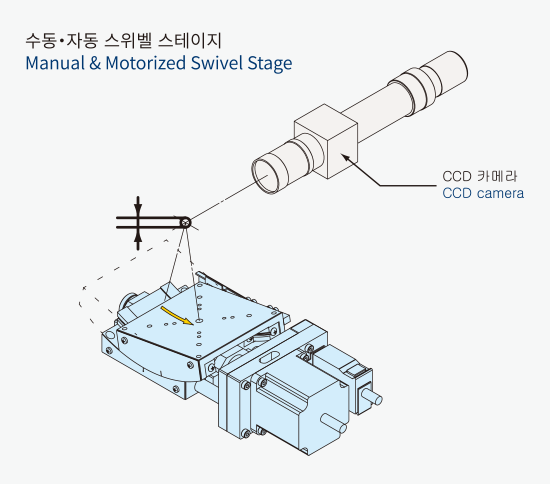
- 9. 워크 디스턴스
- 회전 중심 변위량 측정 시에 설치한 기준점에서 테이블 상면까지의 거리를워크 디스턴스라고 합니다.
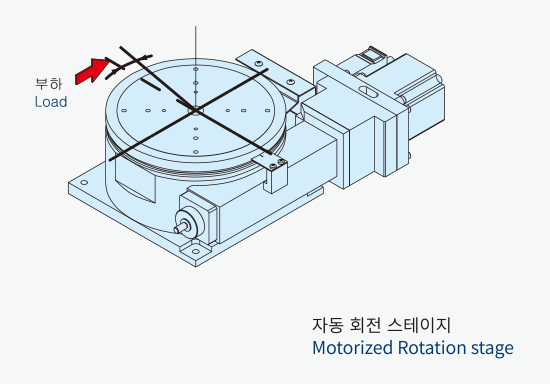
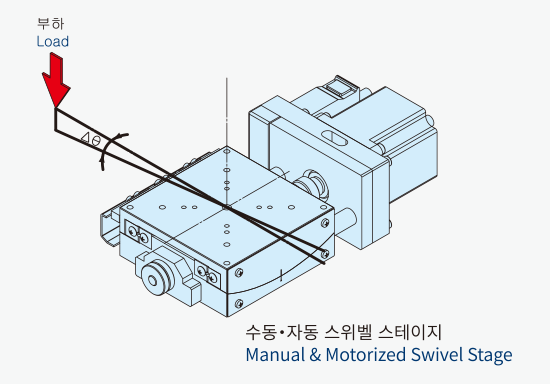
- 10. 수평내하중
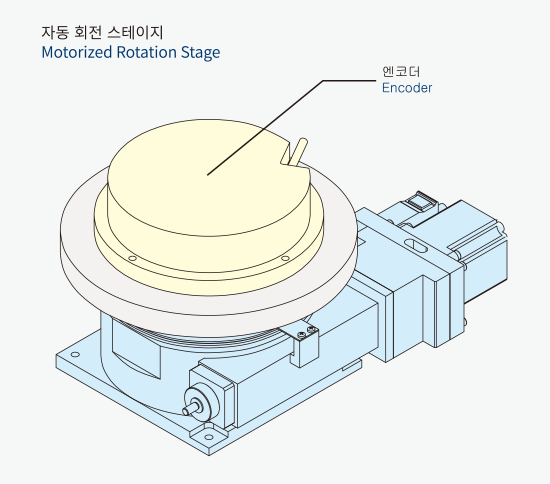
- 스테이지를 수평으로 설치했을 때에, 테이블 중심에 가할 수 있는 한계하중을 말합니다. (정도 보증 가능한 한계 하중입니다.) 자동 회전 스테이지(θ 스테이지)의 누적 오차, 로스트 모션, 각도 재현성 및 피치 오차의 정도 검사는 엔코더(아래 그림)를 이용하여 실시하고 있습니다.
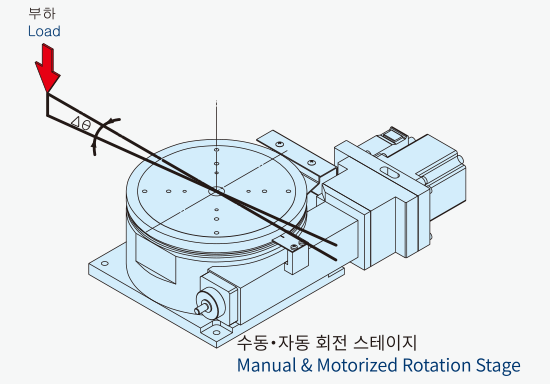
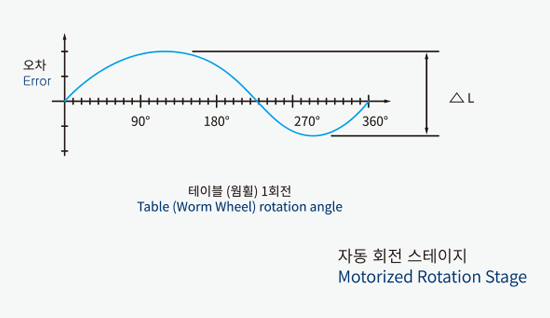
- 11. 누적 오차
- 임의의 위치를 기준점으로 정하고, 기준점에서 한 방향으로 일정 간격으로 순차적으로 위치 결정을 실시하고, 각각의 위치 결정 지점에서의 측정값(기준점에서 실제로 이동한 위치)과 지령값(지령한 실제로 이동해야하는 위치)과의 차이를 360°에서 측정하고, 그 최대 차이를 누적 오차라고 합니다.(아래 그림의 △L)
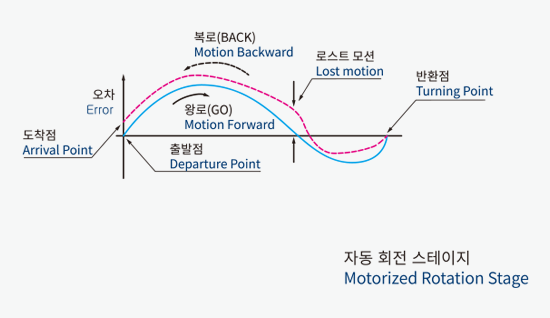
- 12. 로스트 모션
- 임의의 위치를 기준점으로 정하고, 기준점에서 한 방향으로 일정 간격으로 순차적으로 위치결정을 실시하여 1회전 측정한 후, 반대방향으로 똑같이 기준점까지 측정합니다. 각각의 위치결정 지점에서의 갈 때와 올 때의 위치 최대차이를 로스트 모션이라고 합니다.
- ※ X 스테이지의 로스트 모션과 정의가 다릅니다.※ 탄젠트바 식 회전 스테이지의 로스트 모션의 정의는 자동 스위벨 스테이지와 동일합니다.
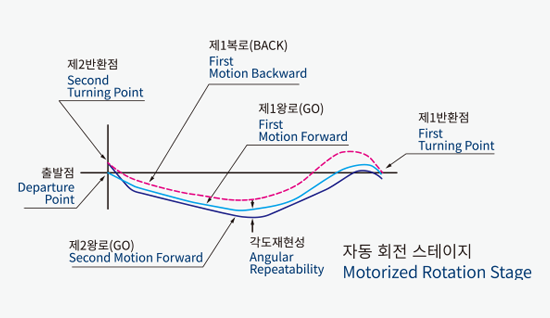
- 13. 각도 재현성
- 임의의 위치를 기준점이라 정하고 기준점에서 한 방향으로 일정 간격으로 순차적으로 위치결정을 실시하고, 1회전 째를 측정한 후 반대 방향으로 기준점까지 되돌아 갑니다. 그 후 다시 반대로 1회전 째와 같이 2회전 째 측정을 실시합니다. 각각의 위치결정 지점 에서의 1회전 째와 2회전 째의 최대차이를 각도 재현성이라고 합니다.
- ※ 탄젠트바식 회전 스테이지의 각도 재현성의 정의는 자동 스위벨 스테이지의 반복 위치 결정 정도와 동일합니다.
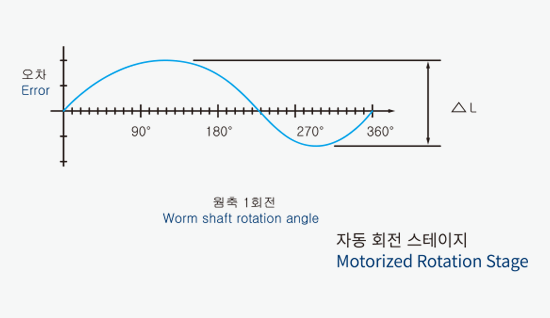
- 14. 피치 오차
- 임의의 위치를 기준점으로 정하고 기준점에서 한 방향으로 일정간격으로 순차적으로 위치결정을 실시하고, 각각의 위치결정 지점에서의 측정값(기준점에서 실제로 이동한 위치)과 지령값(지령한 실제로 이동해야하는 위치)과의 차이를 웜휠의 1치(웜축 1회전) 분의 범위에서 측정하고 그 최대 차이(아래 그림의 ΔL)를 피치 오차라고 합니다.
- 15. 면떨림
- 테이블을 1회전시켜 상면의 바깥 둘레 부근에서 상하방향의 변위를 측정 한 그 최대 차이를 면떨림이라고 합니다.
- ※ 탄젠트바식은 회전범위(풀스크로크)에서 측정합니다.
- 16. 편심
- 테이블을 1회전시키고 회전축의 수평방향의 변위를 측정한 그 측정값의 최대차이를 편심이라고 합니다.
- ※ 탄젠트바식은 회전범위(풀스트로크)로 측정합니다.