


Status Monitor LED
- 1. EtherCAT Status Monitor LED
- LED indicates communication status of EtherCAT.
-
Name Color Function Explanation RUN Green OFF State INIT or Power OFF Blinking State PRE-OPERATIONAL Single Flash State SAFE-OPERATIONAL ON State OPERATIONAL Flickering State BOOTSTRAP ERR Red OFF No Error or Power OFF Blinking Invalid Configuration Single Flash Local Error Double Flash Watchdog Time Out Link /
ActivityGreen OFF Link not Established ON Link Established Flickering Link Established and in Operation 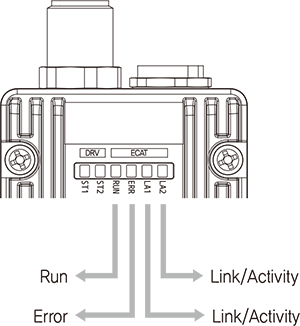
- 1. LED Display
-
Status LED Disable Green :
Red :Green Light Flashing,
Red Light OffEnable Green :
Red :Green Light On,
Red Light OffIn Motion Green :
Red :Green Light On,
Red Light OnIn-position Deviation Green :
Red :Green and Red light
alternately flashingAlarm Green :
Red :Red light flashing repeatedly
as many as alarm number 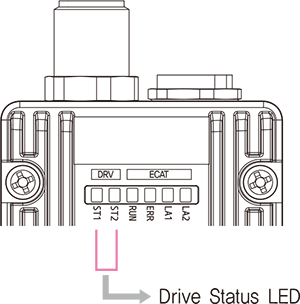
- ◆ Protection functions and LED flash times
-
Times Protection Conditions 1 Over Current Error The current through power devices in inverter exceeds the limit value*1 2 Over Speed Error Motor speed exceeds 3,000 [rpm] 3 Position Tracking Error Position error value is higher than 90˚ in motor run state*2 4 Over Load Error The motor is continuously operated more than 5 seconds under a load exceeding the max. torque 5 Over Temperature Error Inside temperature of drive exceeds 85℃ 6 Over Regenerated Voltage Error Back-EMF is higher than limit value*3 7 Motor Connection Error The power is ON without connection of the motor cable to drive 8 Encoder Connect Error Cable connection error in Encoder connection of drive 10 In-Position Error After operation is finished, position error more than 1 pulse is continued for more than 3 seconds 12 ROM Error Error occurs in parameter storage device(ROM) 15 Position Overflow Error Position error value is higher than 90˚ in motor stop state*2 -
- * 1 : Limit value depends on motor model. (Refer to the Manual)
- * 2 : Default value can be changed by parameter. (Refer to the Manual)
- * 3 : Voltage limit of Back-EMF depends on motor model. (Reefr to the Manual)
- ※ Please refer to uer Manual for the details of protection functions.
Alarm LED flash
(Ex : Position Tracking Error)
Connector
- 1. Input / Output Signal Connector(CN1)
-
No. Function I/O 1 EXT_24VDC Input 2 EXT_GND Input 3 BRAKE+ Output 4 BRAKE- Output 5 LIMIT+ Input 6 LIMIT- Input 7 ORIGIN Input 8 Digital In1 Input 9 Digital In2 Input 10 Digital In3 Input 11 Digital Output1 Output 12 Digital Output2 Output -
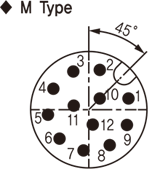
- 2. Motor Connector(CN2)
-
◆ M Type
No. Function I/O 1 24VDC Input 2 24VDC Input 3 GND Input 4 GND Input 
-
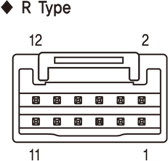
◆ R Type
No. Function I/O 1 24VDC Input 2 GND Input 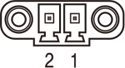
- 5. EtherCAT Communication Connector(CN3, CN4)
-
◆ M Type
No. Function 1 TD+ 2 TD- 3 RD+ 4 RD- Connection hood F.GND 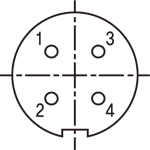
-
◆ R Type
No. Function 1 TD+ 2 TD- 3 RD+ 4 ---- 5 ---- 6 RD- 7 ---- 8 ---- Connection
HoodF.GND 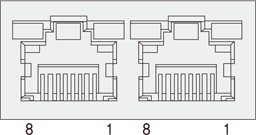
Connector Specifications_ M type
- Connector specifications for cabling to drive.
-
Purpose Item Part Number Manufacture Power
(CN2)Connector 99 0410 75 04 BINDER Signal
(CN1)Connector 99 0492 52 12 BINDER EtherCAT Communication
(CN3, CN4)Connector 99 0409 75 04 BINDER - ※ Above connector is the most suitable product for the drive applied. Another equivalent connector can be used.
Connector Specifications_ R type
- Connector specifications for cabling to drive.
-
Purpose Item Part Number Manufacture Power
(CN2)Terminal Block MC421-38102 DECA Signal
(CN1)Housing
Terminal501646-1200
501648-1000(AWG 26~28)MOLEX - ※ Above connector is the most suitable product for the drive applied. Another equivalent connector can be used.