- 1. EtherCAT Based Motion Control
-
Ezi-STEPⅡ EtherCAT 4X is stepping motor control system using EtherCAT, high speed ethernet (100Mbps Full-Duplex) based fieldbus.
Ezi-STEPⅡ EtherCAT 4X is EtherCAT slave module which support CAN application layer over EtherCAT (CoE). CiA 402 Drive Profile implemented. Supported modes are Profile Position Mode, Homing Mode, Cyclic Synchronous Position Mode. 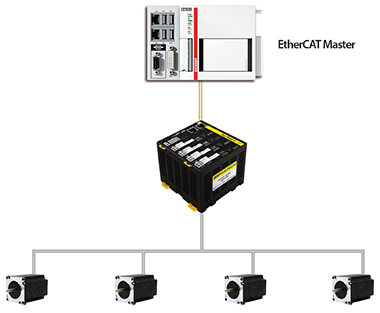
- 2. Microstep and Filtering(High precision Microstep function and Filtering)
- The high-performance MCU operates at step resolutions of 1.8 ° up to maximum 0.0072 ° (1/250 steps) and Ezi-STEPⅡ adjusts PWM control signal in every 50 μsec, which makes it possible for more precise current control, resulting in high-precision Microstep operation.
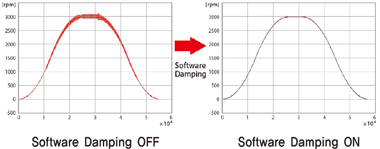
- 3. Software Damping(Vibration suppression and high-speed operation)
-
Vibration suppression and High-speed operation (Patent pending) Motor vibration is created by magnetic flux variations of the motor, lower current from the drive due to back-emf from the motor at high speeds and lowering of phase voltages from the drive. Ezi-STEPⅡ drive detects these problems and the MCU adjusts the phase of the current according to the pole position of the motor, drastically suppressing vibration.
This allows the smooth operation of the motor at high speeds.